2WD fordonet och PROTOTYPING PCB (1 / 10 steg)
Steg 1: GRAND systemet
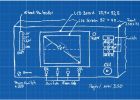
Jag började med Aruino för några månader sedan. När jag beslutade att bygga min pet-robot, beställde jag de delar som jag trodde skulle behövas. Fördriva tiden väntan för bitar att anlända började storslagna planering. Ens är bara knappt bekant med den motoriska kontrollen i Arduino, eller med lödning, jag bestämde mig för att min robot skulle följa vissa sensorer (mina klappar, till exempel, eller att det skulle vara blyg och gömma sig för ljus). I tillägg till detta, skulle det ha en avstånd sensor monterad på servon som skulle skapa en bild av omgivningen, agerar som en sonar. Denna bild skulle sedan vidarebefordras trådlöst till min mobil så att jag kunde se vad som hände runt min söta husdjur. Roboten måste naturligtvis även en bit intelligens med en Bayesiansk inferens procedur som skulle hjälpa den att följa den bästa vägen till slutdestinationen. Min yngsta dotter började tänka på namn för den nya familjemedlemmen, och jag lämnar mitt jobb och flytta in i DIY elektronik. Min fru nickade.
Så, i kit för fordonet anlände...

Design och prototyper av Skelequill Start till slut

Snabb och enkel PCB prototyper med Vinyl!

LED Cube med Arduino och anpassade PCB

Swing - utveckling och Prototyping

DIY Multipurpose Robot (Sumobot, Spybot, Mazebot, Bluetooth...)
Mini oscilloskop kit (del 1)

Arduino Nano-Adapter - mer utrymme på din grindar

Chibikart: Snabb-prototyper en subminiatyr elektriska Go-Kart använder Digital fabrikation och Hobby komponenter

MFOS! 6 steg sequencer frontpanelen och pcb

Kemiska och borrning gratis, kortets pcb

Snabbt enkelt och billigt Launchpad prototyp sköld. MSP430

PCB mockup prototyp i kartong

Från Arduino och perfboard att PCB med fristående MCU

Hur konvertera och mal din PCB layout på din CNC

PCB prototyp tillverkning 3PCB inköp platina nummer, VIP medlem pris
PCB isolering spår fräsning med MyDIYCNC Desktop CNC maskin

Atmel start 2: Microcontroller kretsar och säkringar
Atmel start 3: Binky en-PORT, PIN, DDR och LED
