Aerobox - ett mjukt Robotics System (12 / 12 steg)
Steg 12: Operation


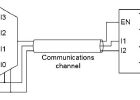
Använda Aerobox, måste du ha en förståelse av hur det fungerar. För att blåsa upp en mjuk robot måste Aerobox stänga sin ventil (genom att ställa in pin 0 till hög) och slå på pumpen (genom att ställa in stift 1 till hög). För att tömma, måste Aerobox öppna sin ventil (genom att ställa in pin 0 till låg) och stänga av pumpen (genom att ställa in stift 1 till låg). Jag har bifogat några väl kommenterade Arduino kod. Ladda upp den, koppla in prydnadssak, och medan den röda lysdioden blinkar fortfarande, tryck på ladda upp i Arduino IDE. För hjälp att inrätta Arduino IDE och installera mappen prydnadssak hårdvara, titta här.
Att ansluta en mjuk robot, ena änden av en bit 1/8" slang ansluten till roboten och den andra änden är ansluten till den Aerobox utdata.

Golv rengöring Robot med Vex Robotics System

Förbättra ett slanglösa System / konvertera icke-Tubeless till slanglösa och stealthing ut däck för utseendet på den.

Hur man bygger ett hem hydrokultur System

Bygga ett inbyggt Linux System i några steg

Upptäck Phenakistoscope: ett vintage animation system
Projekt 6: Ett enkelt meddelande System

Upcycle ett gammalt talaren system till en modern och genomskinligt!

Hur man installerar ett hem basket System på din egen

Hur du associerar .torrent-filer i windows med ett webbaserat torrent system

Hur man gör ett urinblåsan system för en vatten pistol

Rengöring Apple aluminium Keyboard... eller ett mjukt tangentbord
Beräkna termisk prestanda av ett system för solvärme
Hur får man ett basket-System för dina barn

Bygga upp ett ArduCopter!

Komplett Motor guide för Robotics

DIY Aquaponic vertikalt jordbruk System med luftpump

AC monitor system med Intel Edison (Intel IoT RoadShow Brasilien)

Barrel kretsloppsodling System för liten balkong
