ANT + och Arduino Integration med Cateye Ergociser utöva cykel (3 / 5 steg)
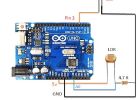
Steg 3: Ledningar för Arduino motionscykel och ANT + sändtagaren



Anslutningar att bearbeta informationen som krävs för Arduino (jag använde den Arduino Uno Special Edition, förvärvade på Radio Shack) och skicka data till ANT + sändtagaren är följande:
1. vridmoment behandlingen (spänning) = Analog A0 på Arduino
2. RPM läsning (Digital) = Digital D3 på Arduino
3. RX i från ANT + Transceiver = Digital D8 på Arduino
4. TX ut till ANT + Transceiver = Digital D9 på Arduino
5. Vin från Cateye Control Board = Vin på Arduino (power input region)
6. GND från Cateye Control Board = GND på Arduino (power input region)
Jag använde mjukvaran följetong subrutin (myserial) för att använda dessa digitala pin platser på Arduino (standard TX/RX är på stift 0 och 1). Jag gjorde detta så jag kunde fortfarande läsa seriell anslutning via USB från Arduino till PC för skärmen felsökning av data kommer från Arduino.
Jag använde även en mellanliggande bygel ombord för att göra kopplingar mellan Arduino TX och RX för ANT + sändtagaren. Jag var tvungen att använda en spänningsavdelare för att avgå från 5V (utdata från Arduino) till 3.3V (gräns för max spänning ingång på RX signal för ANT + sändtagaren). ANT + sändtagaren jag använde var Dynastream ANTAP281M4IB finns på Digikey. Det var ett svårt att löda till och också få ordentlig bygel anslutningarna. Om något nytt är tillgänglig på marknaden, skulle jag gå denna väg nästa gång. Resurser för ledningsdragning Dynastream ordentligt hittades på webben på följande URL: Digitalhacks blogg, särskilt kommentaren angående Pin 17 RTS samband. Skillnaderna i min ledningar var att TXD0 på dynastream var ansluten till D8 (RX) på Arduino och att RXD0 på dynastream var ansluten till D9 (TX) på Arduino. Ytterligare datablad på Dynastream ANTAP281 finns tillgängliga på följande webbadress: datablad ANT +. Anslutningsbeskrivning för alla 17 pinut platser beskrivs ovan (den versionen jag använde var den ytmontering versionen av denna ANT + transceiver). Observera att i metoden som vi satte ut Dynastream baudhastighet informerar den blir 4800 baud. Vi behöver Arduino koden för att återspegla detta.

RS485 Seriell kommunikation mellan Arduino Mega och Arduino Nano med Visuino
Hur man använder och Arduino shield med Raspberry Pi

Designa och bygga en synthesizer med Meeblip och Arduino, adderat video!

Ansiktsigenkänning och spårning med Arduino och OpenCV

Mobile Robotics med repa: bygga en Arduino-baserad insekt-liknande Walker och programmera den med Scratch

Bygga din egen pratar Tom leksak med skrapa och Arduino

Ljus intensitet uträkning med hjälp av BH1715 och Arduino Nano

AlarMe: Den eskalerande väckarklockan med Pi och Arduino

EL Wire hatt: Sekvenserade och ljud aktiverat med fjärrkontroll - drivs med Arduino och Sparkfun

Automatiska bevattningssystem med kapacitiv sond och Arduino på billiga (och jag menar det)

Fotboll straff sparkar spel med ledningar och Arduino

Första stegen med bearbetning och Arduino (styra skiftregister från dator)

Förstärkt verklighet med hjälp av Unity3D, Vuforia och Arduino

Röd färg erkännande baserade Arduino kontroll (med hjälp av MATLAB och Arduino)

Visualisering av verkliga och virtuella prototyp med Solidworks, Labview och Arduino

Signalera flöde affisch (med Chibitronics och Arduino)

Hem byggt IR fjärrkontroll mottagare eller Demodulator med fototransistor och Arduino vederbörlig
Raspberry Pi och Arduino: bygga tillförlitliga system med WatchDog timer