Arduino 2-axlig servo solar tracker (5 / 6 steg)
Steg 5: Arduino koden
#define TILTL 2#define TILTH 3
#define botten 2
#define TOPLEFT 0
#define TOPRIGHT 1
#include < Servo.h >
#include "math.h"
Servo hservo;
Servo vservo;
int tlsense;
int trsense;
int bsense;
int tavg;
int diff;
int spd;
int divisor;
int känslighet;
int tiltl;
int tilth;
Ogiltiga inställningar () {
vservo.attach(9); tillmäter objektet servo servo på pin 9
hservo.attach(10); tillmäter objektet servo servo på stift 10
divisor = 10; Detta styr hastigheten på servo. lägre antal = högre hastighet
känslighet = 5; Detta styr känsligheten i tracker. lägre antal = högre känslighet. om din tracker ständigt Darr och tillbaka öka antalet
Serial.BEGIN(19200); Öppna seriell com
Serial.Print ("SolarTracker ready!");
pinMode (botten, indata); ställa in ingångarna
pinMode (TOPLEFT, indata);
pinMode (TOPRIGHT, indata);
pinMode (TILTL, indata);
pinMode (TILTH, indata);
}
Ogiltig loop () {
tiltl = digitalRead(TILTL); Läs tilt sensor
Tilth = digitalRead(TILTH);
tlsense = analogRead(TOPLEFT); Läs ljussensorer
trsense = analogRead(TOPRIGHT);
bsense = analogRead(BOTTOM);
bsense = bsense * 1,05; Jag var tvungen att justera värdet av sensor för att göra det mer exakt. Du kan behöva göra samma sak men börja med lämnar den ensam
tavg = (tlsense + trsense) / 2; få ett genomsnittligt värde för top 2 sensorer
diff = abs (tavg - bsense); Detta bedömer hur långt tracker måste vända
SPD = diff/divisor; och justerar hastigheten på reaktionen därefter
SPD = max (spd, 1); Anger den lägsta hastigheten till 1
Serial.Print ("\nTOP:"); Serial.Print (tavg, DEC); skriva ut sensorn värdena till den seriella com
Serial.Print("\tBOTTOM:"); Serial.Print (bsense, DEC);
Serial.Print("\tLEFT:"); Serial.Print (tlsense, DEC);
Serial.Print("\tRIGHT:"); Serial.Print (trsense, DEC);
om ((tavg < bsense) & & (diff > känslighet) & & (tiltl == låg) & & (tilth == låg)) {/ / om det genomsnittliga värdet av de översta sensorerna är mindre (mer ljus) än botten sensorn och tilt sensorn är i rätt intervall
vservo.write (90 - spd); Skicka servo kommando för att vända uppåt plus lägga till hastighet
Serial.Print ("\tState:"); Serial.Print("up!");
} else om ((tavg < bsense) & & (diff > känslighet) & & (tiltl == hög) & & (tilth == låg)) {/ / om det genomsnittliga värdet av de översta sensorerna är mindre (mer ljus) än botten sensorn och tilt sensorn är i rätt intervall
vservo.write (90 - spd); Skicka servo kommando för att vända uppåt plus lägga till hastighet
Serial.Print ("\tState:"); Serial.Print("up!");
} else om ((tavg > bsense) & & (diff > känslighet) & & (tiltl == hög) & & (tilth == låg)) {/ / om värdet på botten sensorn är mindre (mer ljus) än det genomsnittliga värdet av de översta sensorerna och tilt sensor är i rätt intervall
vservo.write (90 + spd); Skicka servo kommando att vända nedåt samt lägga till hastighet
Serial.Print ("\tState:"); Serial.Print("down!");
} else om ((tavg > bsense) & & (diff > känslighet) & & (tiltl == låg) & & (tilth == hög)) {/ / om värdet på botten sensorn är mindre (mer ljus) än det genomsnittliga värdet av de översta sensorerna och tilt sensor är i rätt intervall
vservo.write (90 + spd); Skicka servo kommando att vända nedåt samt lägga till hastighet
Serial.Print ("\tState:"); Serial.Print("down!");
} annat {/ / för varje annan instans
vservo.write(90); stoppa motorn y-axeln
Serial.Print ("\tState:"); Serial.Print("stop!");
}
tlsense = analogRead(TOPLEFT); läsa upp 2 sensorer igen eftersom de har förmodligen ändrat
trsense = analogRead(TOPRIGHT);
trsense = trsense * 1,03; igen jag var tvungen att justera värdet av en sensor för att göra tracker mer exakt
diff = abs (tlsense - trsense); återställa variabeln diff för de nya värdena
SPD = diff/divisor; och därmed generera en hastighet
SPD = max (spd, 1); som lägsta hastigheten till 1
om ((tlsense < trsense) & & (diff > känslighet)) {/ / om övre vänstra sensorn är mindre (mer ljus) än den översta högra sensorn
hservo.write (90 + spd); Skicka servo kommando att svänga vänster
Serial.Print ("\tState:"); Serial.Print("left!");
} else om ((tlsense > trsense) & & (diff > känslighet)) {/ / om övre vänstra sensorn värdet är större (mindre ljus) än den översta högra sensorn
hservo.write (90 - spd); Skicka servo kommando till höger
Serial.Print ("\tState:"); Serial.Print("Right!");
} annat {/ / för varje annan instans
hservo.write(90); stoppa motorn x-axeln
Serial.Print ("\tState:"); Serial.Print("stop!");
}
Delay(10); dröjsmål 10ms
}
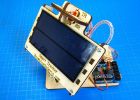
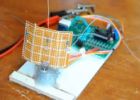
Arduino avsöker sensorerna och reagerar därför att se till att aldrig tilta för långt ner eller upp. Skillnaden i ljus avgör hur snabbt tracker bör reagera.

Arduino & Lego Solar Tracker (dubbla axeln)

Solar tracker med arduino - från varje dag material

Arduino DIY Solar Tracker

Stegmotor + Arduino + Solar Tracker (EV)

Servo baserade dual axis solar tracker
Arduino Solar Tracker med lysdioder!

DIY Mini Solar Tracker
Enkla Dual Axis Solar Tracker

DIY Solar Tracker

Dual axis solar tracker med online energi monitor

Internet Enabled Solar Tracker
Enkelverkande PIC kontrollerade Solar Tracker DIY Kit
Klockan baserat solar tracker experiment

Bärbar Solar Tracker (ingen microcontroller krävs!)

Bärbar Solar Tracker Project - kretsdesign och Breadboarding

Hur man gör tangentbordet lösenord använder arduino att styra servo och ledde

Motion Tracker med PIRs, Arduino och en Servo
Arduino Solar Tracker
