Arduino bibliotek för 28BYJ-48 Stepper Motor och ULN2003 Driver (2 / 3 steg)
Steg 2: StepperMotor.cpp


Nu låt oss skriva klass gränssnittet.
Skapa en fil som heter StepperMotor.cpp, och kopiera koden i bilderna.
Låt oss titta på konstruktören på linje 4. Vi börjar genom att tilldela användaren valt stiften matrisen in stiften på linjer 6 till 9. Detta kommer att göra det enklare att komma åt den pin-koder inom den drivande algoritmen.
På linje 12, vi iterera genom ingångsstift matrisen, och varje stift att utdataläge.
På rad 15 standard vi hela steg till 50 ms.
Linje 18 har vi steg längd setter. Detta är självförklarande.
Nu låt oss titta på metoden steg. Detta gör stegmotor öka antalet gånger som skickades till metoden.
Linje 28 definierar vi rotation sekvensen med en 2d array. Raderna utgör ett steg och kolumnerna representera utgångsstift.
På linje beräkna 37 vi faktorn, som kommer att vara + 1 eller -1, beroende på tecknet av passerade antalet steg. Detta värde är obligatoriskt i algoritm direkt ledning av iteration genom arrayen sekvens, dvs att ändra riktningen av rotation.
På rad 38 vi noOfSteps positiva, krävs för design.
På linje 44 börjar vi en loop som körs för varje startas en rotation, dvs i början av varje 8 steg.
På rad 45 börjar vi en annan slinga som itererar igenom raderna i matrisen sekvens.
På linje 46 skjuter vi som varaktighet anger.
På linje 47 iterera vi genom pin-koder.
På rad 48 skriver vi den digitala signalen till den nuvarande pin-kod.
Om faktor är negativt, nås sekvens matrisens rader i motsatt riktning på linje 48 när vi skriver till stiften. 8 dras av räkningen av raden... så vi åt från botten till toppen.

Arduino/Android BLUETOOTH - 28BYJ 48 Stepper Motor gardin kontroll APP

28BYJ-48 Stepper Motor Control System baserat på Arduino med ULN2003 Chip

Arduino hårdvara PWM för stepper motor enheter
Lätt att bygga CNC Mill Stepper Motor och Driver kretsar
Arduino stepper motor och servon shield - AW GCSE styrelsen

Tank Robot: Kör en tank med motorer och styrenheter drivs av Kinoma skapa

PIR-SENSOR med ARDUINO aktivera STEPPER MOTOR

Arduino + Stepper Motor kamera reglaget

Arduino 6 tråd Stepper Motor handledning

ARDUINO UNO + TB6560 Stepper motor driver

Trä Gear Clock med Stepper Motor Drive

BYJ48 Stepper Motor

Stepper Motor bågreaktorn

Raspberry Pi CNC hatt kontrollerade CDROM Stepper Motor

Motorer och hjul för billigt robotar

Jorden världen roterar med Arduino eller Raspberry Pi kontrollerade Stepper Motor

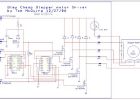
Enkla Stepper Motor Driver för Arduino CNC projekt

Bi Polar Stepper Motor med L293D och Arduino
