Arduino IR RC bil (4 / 6 steg)
Steg 4: Steg 4: anslutning systemet och hur det fungerar

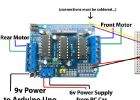
Som ni kan se på Fritzing systemet, är anslutningen inte särskilt svårt. Jag ansluten IR till stift 11 och 6 anslutningarna från H-bron kan anslutas oavsett vad du vill, bara vara säker på att det till vänster stiftet och det längst till höger stiftet är ansluten till PWM utgångar på Nano. Jag använde 5 och 10. Trevlig tutorial på att kontrollera DC motorer med den här modulen kan hittas här
Jag kommer att ge koden senare. För nu måste du ansluta GND och 5V från Nano rätt längsgående rader på styrelsen, och för att ansluta marken från Nano och H-bron, som visas på schematiskt.
Så hur det hela fungerar. Efter att du ladda upp dina program till Nano (medan du gör att jag föredrar att strömförsörjningen inte är ansluten till styrelsen), sätta din strömförsörjning i styrelsen och kontrollera att byglarna är 5V. När du trycker den lilla vita knappen, nätaggregatet borde lysa upp och om din Nano anslutning från 5V + ombord återstod, Nano att blinka en gång signalering han är nu att få ström från nätaggregatet. Du makt också nu IR med strömförsörjningen. Anslut ledningarna från 4AA batterihållaren (akta de inte röra) till 12V och marken av H-bron. H-bryggan bör ljus upp och nu blir 6V från batterierna. Om du använder uppladdningsbara batterier, iallafall i mitt land, ger de bara 1.2V varje, så när spänningen sjunker i H-bryggan på grund av dess interna anslutningar, kommer du inte få tillräckligt spänning att driva motorerna. Så föreslår jag att de vanliga sådana, 1.5V varje.

Arduino Bluetooth RC bil

Arduino Bluetooth RC bil med elektroniska bromssystem

Arduino Xbox RC bil hacka (Maisto Rock Crawler)

Arduino kontrollerade RC bil
Arduino Bluetooth RC bil (Android kontrolleras)
En annan Arduino fjärrkontroll bil kontrolleras av Android-telefon med Bluetooth-modul

Bluetooth Arduino fjärrkontroll bil RC

RoverBluetooth: Arduino-baserad Bluetooth bil

Arduino LEGO bluetooth bil

Arduino Bluetooth RC bil med LCD-

Arduino kontroll rc bil mod

Handledning av en driva lösning för en arduino kontrollerade Robot bil (RC)

Arduino Android Bluetooth bil

Hur man gör en Arduino Ultra ljud bil parkering Sensor

Android RC bil

Spåras Robot Bluetooth kontrolleras av Arduino Via Android ansökan

Arduino Wireless CAR

Arduino Ble Rover
