Arduino kontrollerade CNC / 3D skrivare Hybrid (7 / 20 steg)
Steg 7: Y-axeln - överföringssystem
















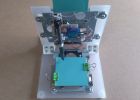
Målet:
Y-axeln överföringssystemet består av en kamrem och remskivor System. De Y-axeln överföring enheterna i den verktygshållaren upp och ner. Används är ett Parade överföringssystem, innebär detta att det finns 2 kuggremmar och 4 block att köra Y-axeln och tillbaka.
Systemet implementeras har ingen minskning, dessa innebär att den drivande trissan är samma diameter som tomgångsskivan. Jag har inga prestandaproblem med denna setup.
Saker som behövs:
2 - 1790-5M-15 kamrem
8 - 686-ZZ skärmade kullager
4 - 20-5M-15 metriska Timing remskiva
4 - aluminium U formade remskiva stöd
4 - M6 kalibrerad schakt för blocken
12 - 4M Grub skruvar (för remskiva)
2 - motor couppling
Verktyg som behövs:
-Borr maskin
-Skruva tapper kit (5mm manliga borr)
-Vinkelslip
Instruktioner:
-Förbereda blocken genom att knacka på M4 manliga skruv (3 hål fördelade 120 grader)
-Infoga 3 4 M grub skruv i de gängade hålen
-Borra ett hål i mitten av blocket så att axeln att passera (6mm diameter hål)
-Gör uthärda bostäder inuti aluminium U former genom att använda en manuell routern slutet kvarn
-Infoga lager inuti husen
-Montera aluminium U formad uthärda bostäder på ramen
-Dra åt bältet runt 2 blocken och låser dem i läge med bra spänning
-Bifoga motor kopplingen remskiva axel

Laserskurna z-Gantry för Scratch byggt CNC/3d skrivare

3020 CNC + Arduino + GRBL + CNC sköld V3

Arduino kontrollerade Servo Robot (serbiska)

Trådlösa Arduino kontrollerade Tank (nRF24L01)

Kompakt CNC/3D skrivare

Sondering och fräsning ett kretskort med en Arduino-baserad CNC

Arduino kontrollerade ljus dimmer

Laser Galvo - Arduino kontrollerade

Sällskapsdjur utegångsförbud: En Arduino kontrollerade sällskapsdjur dörr

Infraröd Sensor guidade Arduino kontrollerade L293D Robot (del 2)

Arduino kontrollerade fyren

Arduino-kontrollerade Wolf svans

Arduino kontrollerade kök Timer
Arduino Mini CNC Plotter-maskin från dvd-enheter

Arduino kontrollerad bil Tracking System baserade på SMS-

Android & Arduino kontrollerade projektorn skärmen

Wall-E's anti-sociala kusin: objekt att undvika Arduino kontrollerade Robot!

Arduino-kontrollerade Smart Home
