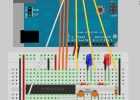
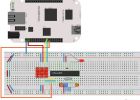
Arduino med accelerometer servomotor (1 / 2 steg)
Steg 1: Arduino kod
ADXL345 accelerometer 2 servo motorstyrning
#include < Wire.h >
#include < Servo.h >
Servo myservox;
Servo myservoy;
#define enhet (0x53)
#define TO_READ (6)
#define TRIGGER 16 byte buff [TO_READ];
int i;
void setup()
{pinMode(TRIGGER,OUTPUT);
digitalWrite(TRIGGER,HIGH);
Wire.BEGIN();
myservox.attach(9);
myservoy.attach(10);
myservox.write(90);
Delay(25);
myservoy.write(90);
Delay(25);
writeTo (enhet, 0x2D, 0);
writeTo (enhet, 0x2D, 16).
writeTo (enhet, 0x2D, 8);}
void loop()
{int regAddress = 0x32;
int x, y, z; digitalWrite(TRIGGER,LOW);
Delay(10); digitalWrite(TRIGGER,HIGH);
readFrom (enhet, regAddress, TO_READ, buff);
x = 0; y = 0; z = 0;
för (jag = 1; jag < = 5; i ++)
{x += (((int)buff[1]) << 8) | buff [0];
y + = (((int)buff[3]) << 8) | buff [2].
z + = (((int)buff[5]) << 8) | buff [4].
Delay(10);
}
x = 5.
y / = 5;
z / = 5;
om (x <-255) x =-255;
annars om (x > 255) x = 255;
om (y <-255) y =-255;
annars om (y > 255) y = 255;
x = karta (x,-255, 255, 0, 180);
y = karta (y,-255, 255, 0, 180);
myservox.write(x);
Delay(25);
myservoy.write(180-y);
Delay(25);
Delay(200);}
void writeTo (int enhet, byte adress, byte val)
{Wire.beginTransmission(device);
Wire.write(Address); Wire.write(val);
Wire.endTransmission(); }
void readFrom (int enheten byte adress, int num, byte buff[])
{Wire.beginTransmission(device);
Wire.write(Address);
Wire.endTransmission();
Wire.beginTransmission(device);
Wire.requestFrom (enhet, num);
int jag = 0;
While(Wire.available())
{
buff [i] = Wire.read(); i ++;
}
Wire.endTransmission();
}

Bluetooth Game controller med Accelerometer och Arduino

Arduino Nano: Accelerometer gyroskop kompass MPU9250 I2C Sensor med Visuino

Fönstret måleri Robot (arduino, bearbetning, accelerometer)

Styra en Arduino med ett armbandsur (TI eZ430 Chronos)

Programmera din Arduino med en Android-enhet via Bluetooth

Kombinera 1 eller fler Arduinos med en RaspberryPi

Kontrollera en Arduino med kakao (Mac OS X) eller C# (Windows)

Programmera din Arduino med en Android-enhet!

Styra Arduino med Android-telefon via Bluetooth

Power Arduino med en mobil
Hur man programmerar en AVR (arduino) med en annan arduino

Ansluta arduino med ethernet
Programmera en Arduino med BeagleBone, utan USB

Pyduino, gränssnitt Arduino med Python via seriell kommunikation

Hur man styr arduino med ett mail

Ordet dammsugare robot - kontrollerad av Arduino med motor sköld, med tryckta motor-hjul

Programmera Arduino med en annan Arduino

Styra servon över Internet via Arduino med Teleduino
