Arduino Nerf mål praxis (2 / 3 steg)
Steg 2: kod
Nerf målövningJ Robson
www.jrobson.me
#include < Servo.h >
Servo myservo1; x - axeln servo
Servo myservo2; y - axeln servo
int pos = 0; variabel att lagra servo position
lång randNumber; Initiera en variabel för ett slumpmässigt servo-läge
void setup()
{
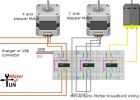
myservo1.attach(8); fäster x axeln servo på digital stift 8
myservo2.attach(9); fäster vid y-axeln servo på digital pin 9
pinMode (4, OUTPUT); fäster laser digital stift 4
}
void loop()
{
myservo1.write (randNumber = random (0, 180)); servo till slumpmässig position på x-axeln mellan 0 och 180 grader
Delay(500); väntar en halv sekund för servo för att nå positionen
myservo2.write (randNumber = random (90, 180)); servo till slumpmässig position på y-axeln mellan 90 och 180 grader
Delay(500); väntar en halv sekund för servo för att nå positionen
digitalWrite (4, hög). slå på målet laser
Delay(2000); målet laser stannar på 2 sekunder
digitalWrite (4, låg). stänga av målet laser
}

Nerf Vortex Praxis / Lumitron / Pyragon uppgradering (aka reclocking)

Nerf Praxis Tips och Tricks

Nerf Praxis lager uppgradering

Arduino kontrollerade Nerf Vulcan

LEGO Nerf Arduino torn

Arduino målövning

Laser tripwire Nerf sentry bomb

RC lastbil på Arduino Robot w / flera sensorer

3D tryckt Arduino xylofon

Arduino robotarm

Arduino blåsinstrument
3D-Printable Nerf-stil gatlopp: Falconer MK II

Stor Nerf krig taktik och kompetens

Gunmetal Nerf Paintjob

Mäta hastigheten på Nerf Dart

Arduino 2 axel tid förflutit Dolly

Glas datorer baserade på Arduino Uno

Arduino & Neopixel Cola flaska Party ljus