Att bygga robotar med Raspberry Pi och Python (3 / 6 steg)
Steg 3: Python Installation och inställningar

2013-02-09-wheezy-raspbian.img
Vi kan kontrollera vår python version genom att använda terminalen för att kontrollera.
Kopiera och klistra in i LXterm
python--version
För de exempel som vi kommer att gå över rekommenderas det att du använder Python 2.6 eller senare versioner. Om Python inte är installerat på datorn kan du använda apt-get beviljat din Raspberry Pi är ansluten till Internet.
Kopiera och klistra in i LXterm
sudo lämplig-få installera python2.6
Installera några av de beroenden
sudo lämplig-få installera python-serial
Kopiera klistra in i LXterm
sudo lämplig-få installera python python-tk inaktiv python-pmw python-imaging
Hämta nästa och placera följande filer till mappen pi.
scanports-arduino.py
term.py
Buttons.py
Nu har vi att göra program verkställare med en chmod kommando
Kopiera och klistra in i LXterm
sudo chmod + x /home/pi/scanports-arduino.py
sudo chmod + x /home/pi/term.py
sudo chmod + x /home/pi/Buttons.py
Programmen bör nu vara körbar och vi kan köra dem genom att dubbelklicka på dem eller via terminal. Det sista steget är att ladda ner och ladda skissen med Arduino IDE.
Om du är obekant med Arduino och dess IDE som du kan läsa på det här.
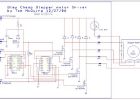
Och slutligen se kopplingsschemat ovan för att ställa in power anslutningarna till roboten basen.

Trådlös jul Light Timer med Raspberry Pi och Python

IBeacon porttelefon med Raspberry Pi och Azure

Aeroponics med Raspberry Pi och luftfuktighetsgivaren

Hur att bygga hus med plastflaskor!

Hur man bygger en människor räknare med Raspberry Pi och Ubidots

Enkla timelapse kamera med Raspberry Pi och en kaffe tin

2 sätt byta med Raspberry PI och Berry IO

Kontrollera en stegmotor med Raspberry Pi och Piface

HumidorPi: En Smart Humidor på de billiga med Raspberry Pi och nod-röd

Hemma temperaturövervakning med Raspberry Pi och Thingspeak (med BMP180)

Morsealfabetet med Raspberry Pi och LED!

Luta vinkel visualisering med Edison, accelerometer och Python

Ännu en annan Exploration Rover web-kontrollerade (med Raspberry Pi och Arduino. Android, Iphone, PC, MAC compatible)

Smart hemautomation webserver på OpenWRT router WR703N kopplats ihop till Arduino, jämfört med Raspberry Pi och Ubuntu

AirPlay Radio med Raspberry Pi och WiFi

Timelapse med Raspberry Pi och hans kamera
Lätt att bygga CNC Mill Stepper Motor och Driver kretsar

NFC med Raspberry Pi och Arduberry
