Autonom Robot med LinkitONE (11 / 13 steg)
Steg 11: Skriva någon kod

Koden här är mycket enkelt!
Du robot har kan göra många funktioner som går framåt, flytta bakåt, rotera etc. Du kan räkna ut funktioner.
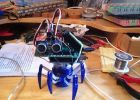
Här gör vi ett hinder undvika er med hjälp av ultraljud sensor. Vi, ll användning servo biblioteket i detta.
KOD:
---------------------
#include < servo.h >
CONST int RForward = 0; CONST int RBackward = 180; CONST int LForward = RBackward; CONST int LBackward = RForward; CONST int RNeutral = 90. CONST int LNeutral = 90. konstanter för motor hastighet const int pingPin = 7. CONST int irPin = 0; Skarpa infraröd sensor stift const int dangerThresh = 10; tröskeln för hinder (i cm) int leftDistance, rightDistance; avstånden på endera sidan Servo panMotor; Servo leftMotor; Servo rightMotor; deklarera motors lång varaktighet; tid det tar att ta emot PING))) signal
void setup() {rightMotor.attach(11); leftMotor.attach(10); panMotor.attach(6); //attach motorer till rätt stift panMotor.write(90); //set PING))) panorera till center}
void loop() {int distanceFwd = ping(); om (distanceFwd > dangerThresh) //if sökväg är klart {leftMotor.write(LForward); rightMotor.write(RForward); //move fram} annat //if väg är blockerad {leftMotor.write(LNeutral); rightMotor.write(RNeutral); panMotor.write(0); delay(500); rightDistance = ping() //scan till den högra delay(500); panMotor.write(180); delay(700); leftDistance = ping() //scan till den vänstra delay(500); panMotor.write(90); //return att centrera delay(100); compareDistance();}} void compareDistance() {om (leftDistance > rightDistance) //if vänster är mindre hindras {leftMotor.write(LBackward); rightMotor.write(RForward); //turn vänstra delay(500);} annat om (rightDistance > leftDistance) //if rätten är mindre hindras {leftMotor.write(LForward); rightMotor.write(RBackward); //turn rätt delay(500);} annat //if de är lika blockerade {leftMotor.write(LForward); rightMotor.write(RBackward); //turn 180 grader delay(1000);}}
lång ping() {/ / skicka ut PING))) signalen puls pinMode (pingPin, produktionen); digitalWrite (pingPin, låg); delayMicroseconds(2); digitalWrite (pingPin, hög); delayMicroseconds(5); digitalWrite (pingPin, låg); Få tid det tar att ta emot echo pinMode (pingPin, ingång); längd = pulseIn (pingPin, hög); Konvertera varaktighet till avstånd avkastning varaktighet / 29 / 2; }
------------

Telefon styrd Robot med LinkitONE

Raspberr Pi Robot-en Hybrid Robot med Advance funktioner

Autonoma mobil Robot med ROS clumsybot
Hex bugg spider med en hjärna (autonom robot)

Bita hinder autonom Robot «Sanglier» (vildsvin)

DIY Johansson - bara en autonom Robot

Raspberry Pi Web kontrollerad / autonom Robot

MICBot autonom Robot hinder Deviance

Gör en Wi-Fi styrd Robot med en LinkIt

Hemgjord rimliga Robot med Bluetooth

Hinder undvika Robot med hjälp av IR-modul gränssnitt med Mediatek LinkIt en stiger ombord

Hur till hacka en trådlös Xbox handkontroll för att göra en autonom robot!
Robot med sex beteenden

Arduino 4wd robot med ping sensor "J-Bot"

Arduino-baserad robot med IR radar

Mobil drivs arduino Uno robot med hjälp av DTMF

Nybörjare autonom robot (delvis)

Billiga 4WD invända att undvika Robot med fyra IR närhet sensorer...
