AUTONOMA HOOVER (Intel IOT) (3 / 4 steg)
Steg 3: förfarande
Ø
Designa en 4 hjul bot för hoover att köra.
Ø tillbaka hjul motorer är varje ansluten till 12V DC försörjning.
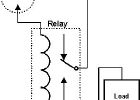
Ø Inorder att gränssnittet intel styrelsen med bot, en 2-kanals relay board är ansluten som hjälper kliva ner spänningen också.
Ø systemet med arduino programvara är ansluten med intel Edison styrelse, programmerade och dumpade i samma för följande resultat:
Damm sensorn används för avkänning dammet och visar värdet damm i LCD-displayen. Närheten sensoren är programmerad för att undvika hinder.
Ø maskinen skulle stoppa automatiskt när det identifierar ett hinder och vinning genom att suga damm.
Ø för suger damm, använder maskinen den fläkt som ligger vid bot.
Ø fläkten går på 12 V DC försörjning.
Ø att lagra damm, en stack session ges längs den suger ut del av fläkten.
Ø A scrubber är placerad på baksidan av bot att rengöra området strax efter det suger damm.

Komma igång med Intel IoT för de riktiga Mac dummies :)

Mobila vaccin Monitor (Intel IoT)
Förebyggande underhåll på Intel IoT roadshow (Intel IoT)

Smart Ads-systemet (Intel IoT) #IntelMaker

Hjärnan inuti (Intel IoT)

DigiWallet - din Smart plånbok (Intel IoT)

Handske Coach - internet anslutna handske för att maximera ditt gym träningspass som drivs av Intel IoT

Chromebook Arduino och Intel Edison guide för Intel IoT EDI utveckling på budget

Kocken insidan INTEL(CII) - framtiden för automatiserad husmanskost (INTEL IoT)

Intellekten Edison buller larm (Intel IoT)

BeatBox: chock spårning för paket med Intel Edison - Intel IOT

DIY amazon Dash använder Intel Edison (Intel IOT)

Designa en Expansion PCB (Intel® IoT)

Edison motoriserade plattform (Intel IoT)

Vård av äldre Monitor (Intel IoT)

Sakernas Internet aktiverat Solar Power utnyttja (intel IoT)

RIO Fitness Tracker (Intel IoT)
Somabot - en automatiserad bartender (Intel IOT)
