AVANCERADE FPV RC bil (3 / 7 steg)
Steg 3: NAZA-M v2

NAZA M är en flygning controller för quadcopter (upp till octacopter) som kan följa GPS waypoints.
Det get's fyra kanaler av Rx och konverterar signaler till fyra ESC signaler för fyra motorerna till quadcopter. Under det omvandlingen det läggs och subtraherar en hel del information att motverka oönskade rörelser av ditt flygplan. Samtidigt göra att den förutsätter att styrenheten sitter i ett flygplan som kan vrida och vända runt sin egen axel tre dimensionella rum.
Självklart kör saker lite annorlunda i en bil.
Förutom beeing i en 2 dimensionella rum (gatan) i stället för en 3 dimensionell har en bil vissa mekanik rörelse medan svarvning, med en dedikerad radie, beroende på vinkeln på hjulen.
Den goda nyheten är, att den NAZA registeransvarige körs fristående, utan nöden av någon start eller andra servo signaler ska kunna köras. Det har även bättre då att: den NAZA registeransvarige förskott några av roder signal till Zenmuse gimbal, vilket innebär gimbal förvandlar "till" turn istället för att försöka motverka och vända sig utåt i svängar.
Jag gjorde split servo kabel, som matar NAZA roder indata och styrning servo av bilen.
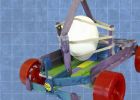
NAZA styrenheten kommer med en GPS-enhet som monteras bäst från alla motorer.
Jag spände fast alla DJI lådor tillsammans och placeras sedan på endast nivå ytan bilen har.
DJI säger att se till att de får tillräckligt med luft till sval, så långt de stannade cool även när fastspänd tillsammans.
Gled bil

DIY $45 FPV Goggles för RC Quad Copters eller plan
Crash Test bilar

Drone Made Easy

Viktig Q&A på rekonditionerade motorer bör du veta

Tamiya F103 GT / / FPV bil

Arduino RC bil med FPV Camera

Bil No.04 jag har integrerade batterier, modularized lite, och tillämpas avancerad net. USB

Avancerade Multimedia Center

16-fots elastisk RC bil handledning

Autonoma R/C Tonka skåpbil med huvudet spårning för FPV (Tonka toppmötet bygga)

Trasiga RC fordonet diagnos: Hur man fixar en RC bil

DIY FPV Racing Drone

DIY Modular & omvandlingsbara FPV Racing Quadcopter!

DIY billiga FPV trådlös glasögon

DIY FPV skyddsglasögon
Lägga till en krets till din bil

Spionera bil Garage dörröppnare :)
