Avlägsen kontrollerade dörrlås (2 / 6 steg)
Steg 2: Steg 2: funktion och drift


För den här designen ska fungera måste det finnas en mekanism som låser dörren på ett sätt som garanterar att den klarar de eventuella krafter som utövas på det med hjälp av intrång. En dead-bult (stål bar som kan dra tillbaka och gå vidare, oftast i ramen av dörrar) valdes som metod för att förebygga dessa krafter. Detta sedan framdrivas av en servomotor som orsakar antingen returgående fas eller befordran av fallkolven.
Handlingen av motorn styrs av indirekt kontrolleras av mottagaren. När knappen på fjärrkontrollen trycks den signal som det sänder tas ut emot av mottagaren. Mottagaren har ett relä på insidan, är det sedan bytte från öppen till stängt läge som sedan skickar en signal till Arduino Uno som används för att flytta till den angivna nästa bit kod. När detta hoppa görs till den angivna bit kod, servomotor i sin tur och sedan aktiverar och skjuter fallkolven framåt i dörrkarmen. Följaktligen att trycka på knappen andra gången kommer att orsaka servomotor sättet att i motsatt riktning och dra in fallkolven från dörrkarmen.

80cm trasiga LED-TV förvandlats till 50W avlägsen kontrollerade ljuslåda

Bygga en alla SOLAR avlägsen kontrollerade båt RC båt med Solar Attic Fan delar - Rescue Boat -

Avlägsen kontrollerade Bluetooth bil
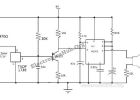
Avlägsen kontrollerade larm krets

Avlägsen kontrollerade robot med mobila video inspelningen

Hur man gör en avlägsen kontrollerade leksak för barn

Lätt naturen gjorde avlägsen kontrollerade lampa!

Avlägsen kontrollerade Titanic papper

Avlägsen kontrollerade grävmaskin

Avlägsen kontrollerade ubåt / undervattens ROV

Avlägsen kontrollerade Pan och Tilt huvud

Avlägsen kontrollerade korg Ball Robot - HARLEM GLOBETROTTERS -

Avlägsen kontrollerade hummer

Avlägsen kontrollerade LED med hjälp av mobiltelefon och Internet

Avlägsen kontrollerade växla med Atmega 328p
Avsnitt 7: Avlägsen kontrollerade vatten ballong

ISPRESSO: avlägsen kontrollerade, Raspberry Pi drivs espressomaskin

Avlägsen kontrollerade relay
