Brandbekämpning Robot (8 / 8 steg)
Steg 8: Program och tråd upp Arduino


void setup()
{
Serial.BEGIN(9600);
pinMode (2, utgång);
pinMode (3, OUTPUT);
pinMode (7, ingång);
pinMode (12, OUTPUT);
pinMode (13, OUTPUT);
pinMode (8, ingående);
pinMode (4, OUTPUT);
pinMode (5, OUTPUT);
pinMode (6, OUTPUT);
}
Kod för att göra motorer arbete med knappen (styrs med en potentiometer:
void loop()
{
om (digitalRead(7) == låg)
{
digitalWrite 13, hög.
int x = analogRead(1);
Serial.Print(x);
Serial.Print("\n");
om (x < 1023/3) {
Sväng vänster
digitalWrite (2, låg).
digitalWrite (3, hög).
}
annars om (x > 2 * 1023/3) {
Sväng höger
digitalWrite (2, hög).
digitalWrite (3, låg).
}
annat {
framåt
digitalWrite (2, hög).
digitalWrite (3, hög).
}
}
annat
{
digitalWrite 13, låg.
digitalWrite (2, låg).
digitalWrite (3, låg).
}
Kod för att göra vattenkanon arbete med en knapp:
om (digitalRead(8) == låg)
{
släpper ventilen
digitalWrite 12, hög.
}
annat
{
digitalWrite (12, låg);
}
Kod för att berätta vilken riktning roboten kommer att flytta när avtryckaren trycks med en tre färgade LED ljus:
int x = analogRead(1);
om (x < 1023/3) {
digitalWrite (4, hög).
digitalWrite (5, låg);
digitalWrite (6, låg);
}
annars om (x > 2 * 1023/3) {
digitalWrite (6, hög).
digitalWrite (4, låg);
digitalWrite (5, låg);
}
annat {
digitalWrite 5, hög,
digitalWrite (4, låg);
digitalWrite (6, låg);
}
}
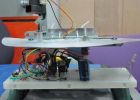
Nedan är en bild av arduino trådbunden upp enligt de stift vi programmerade.
Blå kablar anslutna till MOSFET gå in digital stift 2 och 3 att styra motorer. Lysdioden är ansluten till digital stift 4, 5 och 6. knapparna är anslutna till stift 12 och 13. Potentiometern är ansluten till analog pinne 1.

Bärbar bush brandbekämpning system

Rhino brandbekämpning verktyget

Gör en billig Fire Fighting Robot hemma.
Väggen efter Robot med 555 Timer

O-fett fyrfotingen roboten med akryl ram

Hur du planerar och lansera en fyrverkeri

Billig återanvändbara FX sår med silikon och make-up

Hur man "Gör Toledo" i 30 dagar (eller mindre)

Solar Power System med upp-cyklade komponenter.

Vattenverk: 3D utskrifter av San Francisco vattensystemet med karta

Kelseymh's höga ordning derivat gemensamma förnuftiga sulor av uppenbar (clown skor)

Cylinder/flaska rack

Små vedeldning tält spis

Hur man bygger en snögrotta för vintern överlevnad

Göra en Prop brand yxa av Plywood

Instructables Test kök utbildning

Rostfri Tank spår med stötdämpare dämpning Smart robot chassi

6WD robot med aluminiumchassi
