Bygga en robot Remote Controller (1 / 4 steg)
Steg 1: Planering och Design


Först av allt, rita din önskad design på papper. Göra usre du mäta varje komponent, och lämna tillräckligt utrymme bewteen dem. Kontrollera också att de inte är för nära för att påverka användarupplevelsen.
Vilka komponenter du använder är till stor del beroende på vilken typ av projekt eller robot du försöker kontrollera. För en enkel robotic tank, kan du t ex för att kunna göra det gå framåt och bakåt, sväng vänster och höger. Så fyra tryckknappar skulle vara tillräckligt för att åstadkomma detta.
För min remote controller designar jag inte det snävt för vissa särskilda projekt, men för mer allmän användning. Därför använde jag en kombination av olika typer av komponenter för kontroll.
Här är de delar som jag använde:
- Vippbrytare x 4
- 2-axlig Joystick x 2
- Potentio Meter x 4
- Tryckknapp x 6
- LED x 3
- LCD x 1
- Arduino Mega x 1
- Kablar x många
- Liten skärbräda x 2
- Ciesco XRF trådlösa moduler x 2
Efter det, jag koppla komponenten på en skärbräda och testa dem.

RPi IoT: Cloud loggning robotic luftfuktighet controller
Bygga en robot som följer muspekaren

Bygga en Robot

Remote Controller Safe

Bygga en robot Lego Multigraph
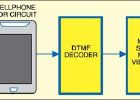
Mobiltelefon-baserade Remote Controller för vattenpump

Bygga en Robot med MSP430 Launchpad

Hur man bygger en Robot - The BeetleBot v2 (Revisited)

Låt oss bygga en Robot!

Bygga en robot båt med vattenflaskor

Hur man bygger en Dj MIDI Controller
Bygga en Robot Walker

Remote Raspberry Pi Robot (PS3 Controller) - Fablab NerveCentre

Bygga en Robot med Perler pärlor

Hur man bygger en RFID Deadbolt Controller

Hur man bygger en Robot som drar 5 Pounds

Hur man bygger en robot Hand med Haptic Feedback

Bygga en Bluespec LED-controller använder Connectal bygga
