Den gula trumman maskin (Arduino) hämnd (3 / 7 steg)
Steg 3: avsluta och testa hi-hat pinnen




Den andra bilden visar alla bitar redo att montera i hi-hat stick manöverdonet. De sista bilderna visar tydligt hur slutet av nödsänkningssolenoiden ser ut. Den tredje bilden visar hur jag använde Mässingstråd för att linda runt nödsänkningssolenoiden. Kabeln var sedan böjda för att fästa i nedre hålet i den hi-hat pinnen. Lite tweaking gjort för en smidig och snabb åtgärd.
På denna punkt har jag hi-hat stick magnetventil fungera. Det utlöses av PING (((sensor som ett test. Den bakre plattformen sticker ut för att ge utrymme för bas stick och magnetventil. PING (((sensorn är kopplad till en liten 9 gram servo monterad på robotens front. Den skannar PING (((sensor fram och tillbaka. Senare koden jämför avläsningar när det söker ett hinder eller letar efter något att spela på. Hinder skatteundandragande ser ut för det mest öppna området, sedan vänder roboten för att möta den riktningen. Letar du efter en yta att trumma på gör motsatsen, försöker hitta närmaste objektet.

Randomiserad Arduino trumman maskin

Ardweeny: den lilla vän Arduino (och hur nötkött upp)

Mini CNC maskin Arduino baserade & Adafruit föraren Motor L293D v1 & 2 * Mini Stepper CD/DVD-spelare #1

Hur man använder den L298 Motor drivrutinsmodulen - Arduino handledning
XYZ Da Vinci Junior (jr) NFC Tag glödtråden återställa hacka Arduino

Den skytiska återskapa med arduino

Hur du gör din egen trumma Bot!

Anpassa elektroniska trummor projekt för att interagera med min Lunetta öppna patch CMOS buller maskin

Mind-kontrollerade trafikljus använder Arduino och MindFlex

Egen Pool Controller - Arduino och Raspberry Pi

Juni 2014 Bulid natt: LittleBits reglaget blinkar

Analoga knappsatsen ryggsäck

Arduino Wind Chill maskin
Den Arduino Internet Gizmo
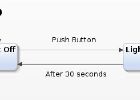
Finite State maskin på en Arduino

En liten te Timer (TTT) maskin för Arduino och ATtiny

Hemgjord CNC fräsning maskin v2 - arduino uno GRBL

Skapa den Arduino drivs LED growbox
