DIY Telepresence använder Ubuntu Laptop (1 / 4 steg)
Steg 1: Steg 1: kontrollera servon med mikrokontroller
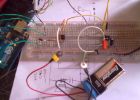
Jag måste säga att jag har blivit kär med MSP430 marker. Det ger dig massor av kontroll (mer än en Arduino) och är mycket billigt. Vad jag verkligen tycker om det är chipet kommer ut (MSP430 G2553) och kan anslutas till ett bröd bräde med bara en 3,3 v strömförsörjning och en pullup motstånd och det körs. Jag skrev koden laddas upp här. Jag använder koden kompositör Studio (CCS), och du kan få det gratis från TI. Jag har gett fem filer. Det finns en huvudfil och sedan två medföljande källfiler med sina *.h filer. Helt enkelt göra ett nytt projekt i CCS och ersätta filen main.c med det jag gav dig och sedan importera de andra fyra filer som har tillhandahållits.
Servon kan behöva en instructable allt på egen hand. Det räcker att säga att finns det tre kablar som går in i en servo (mark, el, Signal). Servo marken behöver vara direkt ansluten till batteriet (-) och grund av mikrokontroller. Servo makt måste anslutas direkt till smeten (+) och ingen annanstans. Servo signalen måste gå till stift 2.0 (2.1 för andra servo).
Med koden på MSP430 och servon ansluten är det dags att göra dessa servon flytta. Det bästa sättet att göra detta är med VSP som jag använde. Om du vill ha, kan VSP driva och prata med MSP430. Detta skulle kräva 4 rader (RX, TX, 3.3V och GND). Kom ihåg att grunden för MSP430 redan är ansluten till marken av batteri och servo. Vi gör gemensamma jordning (åtminstone i USA) så se till att din trädgård är alla vanliga. Specifikt RX fodra av VSP är ansluten direkt till nåla fast 1.1 på MSP430 och TX linjen på VSP är ansluten direkt till nåla fast 1.2 på MSP430. VSP kopplas sedan till valfri dator (det ingen spelar roll på denna punkt).

DIY PCB använder flytande fotoresist

DIY | Ambilight använder Arduino Nano

Hur du använder gamla LAPTOP

DIY amazon Dash använder Intel Edison (Intel IOT)

DIY blacksmithing - konvertera din Grill i en smedja sedan använder den för att återvinna metallskrot i verktyg

DIY Arduino Unit Converter: Hur man använder LCD:

DIY Flex sensor använder Sugru och grafit pulver (Resistencia flexibla usando Sugru y polvo de grafito)

DIY PASSCODE LOCK SYSTEM använder ARDUINO (EEPROM baserat)
DIY avancerade PASSCODE LOCK SYSTEM använder ARDUINO

DIY Cat Purse använder anpassade foto

DIY vindrutan Protector från snö & solen använder foder säckar
DIY: Dörr larmsystem använder Arduino Uno

Hur man använder en limpistol utan Plugin - hantverk Life Hacks - DIY

DIY Safe användande mönster låsa sköld

101 + Hacks life använder ätpinnar

Sparky Jr. - DIY Telepresence Robot

Chibikart: Snabb-prototyper en subminiatyr elektriska Go-Kart använder Digital fabrikation och Hobby komponenter

Hur man använder en laserskärare
