Extremt enkel linje efter Robot med Arduino (2 / 5 steg)
Steg 2: Bygga den fysiska delen av den rad efterföljaren




Du har ett stort utrymme för kreativitet när byggnaden roboten. Du måste helt enkelt följer tre riktlinjer för roboten kommer att fungera med den kod som vi kommer att skriva senare.
För det första måste de två QTI sensorerna placeras sida vid sida.
För det andra måste QTI sensorer placeras i främre eller inline med hjulen. Roboten kommer att inte följa raden, om QTI sensorerna sitter bakom hjulen.
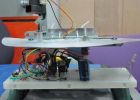
För det tredje måste majoriteten av vikt mellan motordrivna hjul. Detta är att säkerställa roboten inte påverkas av vikt när du svänger. Om du bygger en enkel linje anhängare, är det mycket troligt att batterihållaren är den tyngsta delen av roboten. Det rekommenderas att placera batteriet mellan hjulen.
Resten av designen är upp till din fantasi. Du kan infoga extra komponenter, som LEDs och buzzers.
Jag gjorde en enkel 4x6x1in U kanal, av plexiglas, som jag monterade alla delar.

En enkel linje efter robot med transistorer

Grundläggande raden efter Robot med Arduino

Linje efter robot med PID algoritm

Enkel linje efter robot

Enkel linje efter robot för nybörjare

Världens enklaste linje efter Robot

Hur man gör en linje efter Robot

SUPER ENKEL NYBÖRJARE ROBOT II (ARDUINO UNO VER.)

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

2WD röst kontrollerat Robot med Arduino och BitVoicer Server

Kontrollera en Roomba robot med Arduino och Android

Avlägsen kontrollerade robot med Arduino och T.V. remote

Hur man gör en mobiltelefon och dator kontrolleras 3D tryckta Robot med Arduino - IoBot.

Hinder att undvika Robot med arduino
Väggen efter Robot med 555 Timer

Realtid ansikte spårning Robot med Arduino och Matlab

Min Arduino linje efter Robot! -Med Pololu kvart-6A IR reflektans Sensor Array

Gest kontroll car(robot) med Arduino och Android(bluetooth)
