Flaska Display med LED (6 / 7 steg)
Steg 6: Arduino

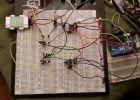
Arduino koden som jag använde är inte särskilt svårt att förstå. Det är en grundläggande kod. Du måste kontrollera om du har servo biblioteket på din dator. Om inte du kommer att få ett fel med att ladda upp. I bilden ovan ser du en arduino nano. först ville jag er en av, men eftersom de inte kan suply nog nuvarande. Slutligen använder jag en arduino uno.
Jag har inte lagt servo i mitt projekt men koden är redo för det så prova det!
Efter all kod ser ut så här:
#include
Servo myservo;
CONST int RoodPin = A1;
CONST int GroenPin = A2;
CONST int BlauwPin = A3;
CONST int RoodmeterPin = A4;
CONST int GroenmeterPin = A5;
CONST int BlauwmeterPin = A0;
int Roodwaarden;
int Groenwaarden;
int Blauwwaarden;
int pos = 0;
void setup() {
myservo.attach(9);
pinMode (RoodPin, OUTPUT);
pinMode (GroenPin, OUTPUT);
pinMode (BlauwPin, OUTPUT);
}
void loop() {
för (pos = 0; pos < = 180, pos + = 1) {/ / går från 0 grader till 180 grader
myservo.write(POS); berätta servo gå för att placera i variabel "pos"
Roodwaarden = (karta (analogRead(RoodmeterPin), 0, 1024, 0, 255));
Blauwwaarden = (karta (analogRead(BlauwmeterPin), 0, 1024, 0, 255));
Groenwaarden = (karta (analogRead(GroenmeterPin), 0, 1024, 0, 255));
Serial.Print ("Rood =");
Serial.println(Roodwaarden);
Serial.Print ("Groen =");
Serial.println(Groenwaarden);
Serial.Print ("Blauw =");
Serial.println(Blauwwaarden);
Serial.println("");
analogWrite (RoodPin, Roodwaarden);
analogWrite (BlauwPin, Blauwwaarden);
analogWrite (GroenPin, Groenwaarden);
Delay(40); Waits 15 MS för servo att nå ställning
}
för (pos = 180, pos > = 0; pos-= 1) {/ / går från 180 grader till 0 grader
myservo.write(POS); berätta servo gå för att placera i variabel "pos"
Roodwaarden = (karta (analogRead(RoodmeterPin), 0, 1024, 0, 255));
Blauwwaarden = (karta (analogRead(BlauwmeterPin), 0, 1024, 0, 255));
Groenwaarden = (karta (analogRead(GroenmeterPin), 0, 1024, 0, 255));
Serial.Print ("Rood =");
Serial.println(Roodwaarden);
Serial.Print ("Groen =");
Serial.println(Groenwaarden);
Serial.Print ("Blauw =");
Serial.println(Blauwwaarden);
Serial.println("");
analogWrite (RoodPin, Roodwaarden);
analogWrite (BlauwPin, Blauwwaarden);
analogWrite (GroenPin, Groenwaarden);
Delay(40); Waits 15 MS för servo att nå ställning
}
}

En flaska lampa med led tejp.

Awesome trämöbler Display med LED

Gränssnitt 7 Segment LED-Display med FT232

RGB + W/UV LED Strip tvätta ljus med LED-Display

DMX-512 LED-Controller med LED-skärm

Bärbar TV-spel med led skärm

Rumstemperatur i Dot-Matrix Display med Arduino och LM35

Läsk flaska blomma Kotor LED bordslampa

Arduino Nano: Analog 7 Segment MAX7219 Display med Visuino
2 siffrig 7 Segment Display med 8 stift

Animerade Halloween display med hjälp av en elmotor och en cykel

Kontrollera en 7 segment 4 siffrig display med en Raspberry Pi

Bygga en enkel projektion mappas Display med Pixel mappas lysdioder

"Pulp Fiction" Flasköppnare med magnetiska fångst

Natt cykel 2.0 med LED

IPhone laddar dock med LED
Hemgjorda elektriska bordsskiva fontän med LED-ljus

Hur man gör DIY växa lampor med LED Strip ljus