Flatulant Boss detektor (7 / 9 steg)
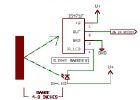
Steg 7: nu för den svåra biten.

Denna bild är slutprodukten. Jag lämnar elektroniken som en övning för studenten.
Här är koden för PIC Micro 12F675:
;*****************************************************************************
; Filnamn: Flatulant_Boss
; Processor: 12F675
; Författare: Alan Mollick (alanmollick.com)
; Läge: Avbryta på GP2 förändring
;
; ~ GPIO REGISTRERAR ~
; GP0 = ingång--n/c
; GP1 = utgång--relay
; GP2 = INPUT--hög = rörelse upptäcks
; GP3 = ingång--n/c
; GP4 = utgång--röd LED
;*****************************************************************************
lista över p = 12F675; lista direktiv att definiera processor
#include < p12f675.inc >; processorn varierande definitioner
ERRORLEVEL-302; dölja meddelandet 302 från listan över
CONFIG _CP_OFF & _CPD_OFF & _BODEN_OFF & _MCLRE_OFF & _WDT_OFF & _PWRTE_ON & _INTRC_OSC_NOCLKOUT
; ~ Variabler ~
w_temp EQU 0x20; variabel som används för ramen besparing
status_temp EQU 0x21; variabel som används för ramen besparing
hiB EQU 0x21; MSByte
lowB EQU 0x22; LSByte
Temp EQU 0x23
extra EQU 0x24
temp1 EQU 0x25; utlösa avbrott flagga
temp2 EQU 0x26
dröjsmål EQU 0x27; fördröjningstiden
Pins EQU 0x28; PIN staten
spare1 EQU 0x29
spare2 EQU 0x2a
greve EQU 0x2b; loop greve
count1 EQU 0x2c; yttre loopen greve
count2 EQU 0x2d; yttre loopen greve
D1 EQU 0x2e; dröjsmål counter
D2 EQU 0x2f; dröjsmål counter
D3 EQU 0x30; dröjsmål counter
D4 EQU 0x31; dröjsmål counter
;**********************************************************************
RESET_VECTOR ORG 0X000; processorn återställa vektor
gå till huvudsakliga; gå till början av program
INT_VECTOR ORG 0X004; avbrott vektor läge
movwf w_temp; spara av nuvarande W registrera innehållet
movf STATUS, w; flytta statusregistret till W register
movwf status_temp; besparing av innehållet i STATUS register
; ISR kod
kalla motion_detect; Skicka varningssignaler
banksel INTCON
BCF INTCON, ITF; Rensa GP2/INT flagga
movf status_temp, w; Hämta kopia av STATUS register
movwf STATUS, restaurera pre-isr STATUS register innehållet
swapf w_temp, f
swapf w_temp, w; återställa pre-isr W register innehållet
retfie; returnera från avbrott
;****************************************************************
huvudsakliga:; huvudprogrammet
; dessa första 4 instruktioner behövs inte om intern oscillator inte används
kalla 0x3FF; Hämta fabriken kalibreringsvärde
BSF STATUS, RP0; sätta filen register bank till 1
movwf OSCCAL; Uppdatera registret med fabriken cal värde
BCF STATUS, RP0; Anger filen register bank 0
;***********************************
; * Initiering *
;***********************************
; GP0 = inte används, GP1 = reläutgång, GP2 = input (motion detect),
; GP3 = ingång för cntrl/emergency cutoff, GP4 = utgång till LED-indikator,
; GP5 = inte används
; ställa in riktning I/O Pins
banksel TRISIO
movlw b '00000101'
; xx---inte genomfört
; --0---0 = utgång, GP5 = n/c
; ---0---0 = utgång, GP4 = LED
; ---x---inte används, GP3, tillägnad MCLR
; ---1--1 = ingång, GP2 rörelse upptäcks
; ---0-0 = utgång, GP1 = magnetventil
; ---1 1 = ingång GP0 = A/D
movwf TRISIO
; Ställ in A/D-omvandlare
banksel ANSEL
movlw b '00010000'
; x---inte genomfört
; -001---001 = Focs/8 konvertering klocka
; ---0---0 = digital I/O, GP4, Fosc/4 clockout för debug ändamål.
; ---0--0 = digital I/O, GP2
; ---0-0 = digital I/O, GP1, relä/etc
; ---0 0 = digital i/o, 1 = analoga GP0
movwf ANSEL
banksel ADCON0
movlw b '00000000'
; 0---1 = rätt motiverade resultat
; -0---0 = Vdd är spänning referens
; --xx---inte genomfört
; ---00--00 = välja kanal 0 (GP0)
; ---0-0 0 0/D omvandling inte startat
; ---0 0 = A/D-omvandlare-modulen är avstängd
movwf ADCON0
; initiera utgångsstift
init
banksel GPIO
movlw b '00000000'
movwf GPIO
; initiera avbryter
banksel INTCON
movlw b '00000000'
; 0---0 = global avbryter inaktiverad
; -0---1 = aktivera perifera avbryter
; --0---0 = inaktivera TMR0 overflow avbrott
; ---1---1 = aktivera GP2/INT yttre mellanjobb
; ---0---0 = inaktivera GPIO port förändring avbrott
; ---0--0 = ingen på TMR0 overflow
; ------0- 1=
; ---0 0 = ingen GPIO port förändring
movwf INTCON
; initiera avbrott på stift ändra GP2
banksel IOCEN
movlw b "00000100"
; x---inte genomfört
; -x---inte genomfört
; --0---0 = inaktivera GP5
; ---0---0 = inaktivera GP4
; ---0---0 = inaktivera GP3
; ---1--1 = aktivera GP2/INTR ***
; ---0-0 = inaktivera GP1
; ---0 0 = inaktivera GP0
movwf IOCEN
banksel PIE1
movlw b '00000000'
; 0---0 = inaktivera EE skriva komplett avbrott
; -0---0 = inaktivera A/D-omvandlare avbrott
; --xx---inte genomfört
; ---0---0 = komparator avbrott inaktiverad
; ---xx-inte genomfört
; ---0 1 = aktivera TMR1 overflow avbrott
movwf PIE1
banksel PIR1
movlw b '00000000'
; 0---0 = ingen EE skriva komplett
; -0---0 = ingen A/D omvandling komplett
; --xx---inte genomfört
; ---0---0 = ingen kontrollapparat avbrott
; ---xx-inte genomfört
; ---0 0 = ingen TMR1 overflow
movwf PIR1
;**********************************************************
; GP1 = utgång till relä
; GP4 = utgång till LED
;**********************************************************
banksel INTCON
BSF INTCON, INTE; Aktivera GP2-avbrott
BSF INTCON, GIE
Main_Loop:
; om GP2 = 1 sedan utgång varningssignaler på GP1, GP4 via avbrott
sömn
NOP
gå till Main_Loop
;**********************************************************
; Motion Detection avbrottshanterare
;
; GP1 = utgång till relä, GP4 = utgång till LED
;**********************************************************
motion_detect:
BSF GPIO, 1; vitalisera relä för 100 MSEK
kalla pause_100ms
BCF GPIO, 1; de-aktivera relä
BSF GPIO, 4. Aktivera LED för 0.5 sek.
kalla pause_500ms
BCF GPIO, 4
returnera
;**********************************************************
; Online dröjsmål kodgenerator
; http://massmind.org/techref/piclist/Codegen/Delay.htm
;**********************************************************
pause_100msec:
; Delay = 0.1 sekunder
; Klockfrekvensen = 4 MHz
movlw 0x1F; 99998 cykler
movwf d1
movlw 0x4F
movwf d2
Delay_100
decfsz d1, f
gå till $+ 2
decfsz d2, f
gå till Delay_100
gå till $+ 1; 2 cykler
returnera
pause_500msec:
; Delay = 0,5 sekunder
; Klockfrekvensen = 4 MHz
movlw 0x03; 499994 cykler
movwf d1
movlw 0x18
movwf d2
movlw 0x02
movwf d3
Delay_500
decfsz d1, f
gå till $+ 2
decfsz d2, f
gå till $+ 2
decfsz d3, f
gå till Delay_500
gå till $+ 1, 6 cykler
gå till $+ 1
gå till $+ 1
returnera
pause_1sec
; Delay = 1 sekunder
; Klockfrekvensen = 4 MHz
movlw 0x08; 999997 cykler
movwf d1
movlw 0x2F
movwf d2
movlw 0x03
movwf d3
Delay_1sec
decfsz d1, f
gå till $+ 2
decfsz d2, f
gå till $+ 2
decfsz d3, f
gå till Delay_1sec
gå till $+ 1, 3 cykler
NOP
returnera
;*****************************************************************************

9V IR-detektor

Bygga en Pocket joniserande strålning detektor (PIRD)

Boss TR2 C4 Mod

Barns Robot kostym med ljudeffekter, godis detektor och mer

Custom 1969 Ford Mustang Boss 429

Bygga din egen Ghost mätare/falska detektor av saker

Boss Monster infoga

Julerbjudande - Santa detektor och mer
En mycket enkel närhet detektor

Lufta föroreningar detektor

Automatisk färg detektor med LDR

Lätt, enkelt mörka detektor

Tömma vatten detektor

Metal detektor

Coin slot detektor
Frekvens detektor PIC 12F683 Processor med

Väldigt blommig Cake Boss Cupcakes från scratch

Coherer kärnvapenexplosion detektor
