Gör: it Robotics Starter Kit fånga Sensor Data (3 / 3 steg)
Steg 3: Skriv ner sensordata




Jag har placerat min robot på en uppsättning av block för att få hjulen från marken så jag kan sidan några papper under sensorerna.
Också att märka jag har fotokopierats en liten del av den svarta linjen från cirkeln. Vi kommer att använda denna linje för att mäta vad sensorerna läser i våra tester.
Observera att rätt hjulet har tagits bort. Papperet vilande på på ratten för att få linjen nära sensorerna. Centrera den svarta linjen mellan sensorerna som vi vill få en läsning av vit på båda sensorerna först.
När du kör testerna inte behöver du aktivera batterierna, så hjulen kommer inte att vända. Men sensorerna kommer att fungera alldeles utmärkt.
Öppna din Arduino IDE om den inte öppnas redan. Anslut bara USB-kabeln som du använder för att programmera din robot till USB-porten på Arduino. Om du kör Windows,
Öppna din anordning direktör nytta, Kontrollpanelen -> system och säkerhet -> Enhetshanteraren. Expandera portar (COM & LPT) ikonen. Notera vilken COM Port din Arduino är ansluten till. Anteckna denna port. Nu ansluta FTDI USB kabeln till din dator.
Öppna Enhetshanteraren och skriva ner COM-porten av FTDI USB kabeln. Öppna Verktyg -> Port menyn på din Arduino IDE och markerar den rätta porten för din FTDI USB kabel.
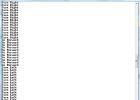
På min dator är var COM port 3. Nu du Verktyg -> seriell övervaka menyalternativ och markerar en 9600-överföringshastigheten i det nedre högra hörnet. Om du gjorde allt rätt bör du se produktionen i den bilden nedan.
Nu flytta papperet så att den svarta linjen är under rätt sensorn, skriva ner dina mått och sedan göra samma sak för den vänstra sensorn.
Efter att ha tagit alla dina mått har du sammanlagt 6 sensormätningar:
Vänster och höger mätningar tas tittar på framsidan av roboten.
Center = FF och 100
Höger = FF och 1FF
Vänster = 0 och 100
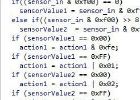
Dessa nummer Läs i hexadecimal, min handledning och länkar som pekar på. Nästa Instructble blir att ta våra sensormätningar och kör dem genom vårt program för ReadOptical.py.

Gör: it Robotics Starter Kit
Gör: it Robotics startkit - skicka Sensor Data trådlöst

Interaktiva Ambient Sensor med Intel Edison & Grove Starter Kit Plus
Komma igång med GearBest Starter Kit för Arduino

Murare burk brand start Kit

Starta och stänga datorn

Eld start Kit

Minecraft enkla Starter Kit för överlevnad spelare

Hydrokultur DROPP växande Starter Kit (med chili)
Gör: it Robotics startkit - analysera LineFollowing.ino del 2

Gör: it Robotics startkit-förare ombord förtrogenhet

Sup! Gemenskapens berättande uppleva IoT Kiosk

Intro till Robotics

Hemmet gjorde molekylär modell Kit

Komma igång för Arduino Kit (nybörjare)

Starter projekt 2 | Objekt som sensorer

Starter Project 3 | Sensing utrymmen

Hur du använder Tymkrs vända mig Kit
