Gör: it Robotics startkit-förare ombord förtrogenhet




I detta blogginlägg kommer vi ta en titt på den förare ombord som medföljer startpaketet gör: it Robotics. Det finns ingen dokumentation som kommer med Start kit om förare ombord än schematiskt.
Om du inte har några erfarenheter läsa scheman i uppgift att förstå vad som är på förare ombord och hur man använder det bortom de kit som Radio Shack erbjuder kan vara lite skrämmande.
Så vi kommer att visa några bilder av förare ombord och schematiskt och peka på några av viktiga delar och koppla dessa till schematiskt så alla kan följa med och lära dig mer om förare ombord. Låter starta lätt: (Klicka på bilderna för en större bild på bilden)
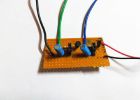
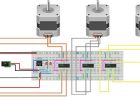
Här är en en bild av motor styrelsen med vissa terminal kontakter markerade i rött och gult.
Den gula boxen på föraren styrelsen bilden är terminal kontakten för makt i förare ombord från rutorna batteri.
Om du kommer ihåg när du byggt roboten, wired du rutorna två batterier i serie (svart bly från en batteribox var kabelansluten till Blymönja av andra batterilådan.
Sedan var en bly från varje ruta kabelansluten till terminal kontakterna på förare ombord). Om du tar en spänning läsa på två anslutningar av föraren ombord, borde du få en läsning av ca 12 volt.
Om du inte är intresserad av att förstå hur strömkretsen byggdes, du verkligen behöver inte skynda alltför mycket tid läser schematiskt.
Två röda rutorna på bilden av förare ombord är de motoriska terminal kontakterna. Den vänstra terminal connector är för motorer 1 och 2. Den rätt terminal connector är för motorer 3 och 4.
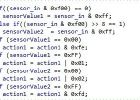
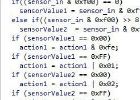
Ovan är bilder av scheman av motorn förarens kretsen. Igen om du inte vill lära sig hur kretsen är utformad borde sedan du inte behöva spendera mycket tid att titta över schematiskt.
För mer information kolla in min blogg:
http://joepitz.wordpress.com/
Gör: it Robotics startkit - skicka Sensor Data trådlöst

Gör: it Robotics startkit-trådlös Connectivity
Gör: it Robotics startkit - förståelse bitvis Math
Gör: it Robotics startkit - analysera LineFollowing.ino del 2

Daft Punk tabell replika förare ombord

CNC förare ombord (Multi axel)

EL förare ombord
Enkla, billiga Motor förare ombord för Arduino

Bygga L293D dubbla Motor förare ombord för Arduino
L293D förare ombord för CNC

Arduino Nano: Kontroll borstad likströmsmotor med L9110S förare ombord och Visuino

Bygga en LED förare ombord för Arduino (och andra parlamentsledamöter) använder Quad H-broar

HobbyCNC 4-axlig Stepper Motor förare ombord

Den enkla relay förare ombord för TTL, Arduino, PIC, etc...
Gör: it Robotics startkit - analysera LineFollowing.ino Del1

Enkelt dubbel effekt av en L293D Motor förare ombord

Intellekten Edison och Ridemakerz RC chassi Robotics plattform

Intro till Robotics
