Gör: it Robotics startkit-förare ombord förtrogenhet (3 / 3 steg)
Steg 3: Extra stift för anpassade sensorer


En av de trevliga funktionerna styrelsens drivrutin som medföljer startpaketet gör: it Robotics är att det finns extra Arduino stiften på förare ombord som inte används.
Dessa extra port stift kan sedan användas för att förbättra roboten med funktionerna i din egen design.
För dem som inte är bekant med Arduino design.
En styrelse som ansluts till Arduino kallas en sköld. Arduino familjen av mikro-controller styrelser har rader av kvinnliga headers runt bordet. Dessa header stift används gränssnittet sensorer och andra externa enheter som kan användas för att kommunicera utåt.
En Arduino shield har manliga header stiften på botten av styrelsen som passar direkt i kvinnliga sidhuvud stift på Arduino. Vid styrelsens drivrutin som medföljer startpaketet gör: it Robotics används inte alla port stift.
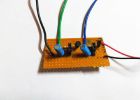
Så om vi vill lägga till några nya sensorer eller externa enheter, som Wifi kommunikation till din robot, extra port stiften är tillgängliga att göra så. Dessa extra stift är inte dokumenterat någonstans utom på schematiskt. Så detta blogginlägg visar föraren styrelsen bilden och schematiska bilden och mappa dessa tillgänglig port stift så att alla se var de är på förare ombord.
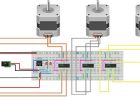
Ovan är bilden med port stiften rödmarkerade föraren ombord, och en bild av samma header stiften från schematiskt:
En metod som är vanlig på mönsterkort (PCB) är att märka anslutningarna.
Om du ser på schematiskt och nära på förare ombord kan du se några av dessa etiketter. Observera några av etiketterna täcks av faktiska svarta kvinnliga sidhuvud porten pin uttag. Du måste bara göra en kvalificerad gissning genom att jämföra dessa portar med andra stift där etiketterna syns faktiskt.
Märka på föraren styrelsen bilden, övre vänstra huvudet stiften, markerade i rött, om du tittar noga kan du se lödde manliga stiften som finns på botten av förare ombord. Dessa pins visas också på schematiskt. Observera att dessa stift är kopplade till kvinnliga huvud-uttagen på schematiskt av en svart linje.
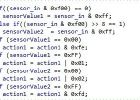
På schematiskt kvinnliga huvud pin uttag är märkta A, B, C och D. Du bör ha några problem i matchande dessa header pin uttag på förare ombord till de som visas i schematiskt. Kom ihåg i tidigare blogginlägg, "Make: it Robotics startkit-programvara del 2″ vi använt stift 4 och 5 så vi kan skicka våra sensordata till vår programvara seriell port och sedan vidare till vår dator.
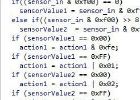
Genom att titta på schematiskt kunde jag bestämma att stift 4 och 5 är extra stift inte används av förare ombord. Observera att i avsnitt A på schematiskt att alla stift, övre vänstra strand, används, så det finns inga extra stift som vi kan använda i det här avsnittet för data port stift, men stiften märkta 3,3 V, 5 V och GND kan användas till att driva sensorer eller enheter som vi vill ansluta till en ledig port stift i avsnitt B och D. Om vi tittar på avsnitt B, kan vi se det klämmer fast A0 används. A stiften är analog stift, alla andra stift på Arduino är digital stift. Google skillnaden om du behöver en förståelse.
Det betyder att stiften A1-A5 används inte och vi kunde använda dessa analoga pins för våra egna ändringar av vår robot. Också titta på avsnitt C. märker att alla port stift är används i avsnitt C. Så kan inte vi använder dessa port pins för egen användning. Titta nu på avsnitt D, märker att port stift 2 och 3 används, används i själva verket port stift 2 och 3 för att kommunicera mellan processorn på förare ombord till Arduino. Resten av port stiften 4 – 7 finns att använda till använda.
Genom att titta på schematiskt, verkar port stift 1 och 2 ska inte användas på förare ombord. Kom ihåg förare ombord är en sköld och ansluts direkt till Arduino. På Arduino används stift 1 och 2 för att kommunicera med omvärlden med den inbyggda maskinvara seriell port. Så vill vi normalt inte använda port stift 1 och 2 på förare ombord.
Mer framöver.
Gör: it Robotics startkit - skicka Sensor Data trådlöst

Gör: it Robotics startkit-trådlös Connectivity
Gör: it Robotics startkit - förståelse bitvis Math
Gör: it Robotics startkit - analysera LineFollowing.ino del 2

Daft Punk tabell replika förare ombord

CNC förare ombord (Multi axel)

EL förare ombord
Enkla, billiga Motor förare ombord för Arduino

Bygga L293D dubbla Motor förare ombord för Arduino
L293D förare ombord för CNC

Arduino Nano: Kontroll borstad likströmsmotor med L9110S förare ombord och Visuino

Bygga en LED förare ombord för Arduino (och andra parlamentsledamöter) använder Quad H-broar

HobbyCNC 4-axlig Stepper Motor förare ombord

Den enkla relay förare ombord för TTL, Arduino, PIC, etc...
Gör: it Robotics startkit - analysera LineFollowing.ino Del1

Enkelt dubbel effekt av en L293D Motor förare ombord

Intellekten Edison och Ridemakerz RC chassi Robotics plattform

Intro till Robotics
