Gör: it Robotics Starter Kit fånga Sensor Data (1 / 3 steg)
Steg 1: Ändra lineFollow.ino Program
Titta på framsidan av roboten, är dessa på den högra nedre uppsättningen huvud stift.
Vi kommer att göra pin 4 ta emot pin och pin 5 sändnings pin:
Här är vår kod ändringar:
#include < SoftwareSerial >
#include "MakeItRobotics.h" //include bibliotek
#define rxPin 4
#define txPin 5
MakeItRobotics line_following; deklarera objekt
SoftwareSerial mySerial = SoftwareSerial (rxPin, txPin);
Placera denna kod i avsnittet deklaration/omfatta diskuteras i det senaste blogginlägget:
Vi berättar våra lineFollow.ino programmet ska omfatta filen SoftwareSerial.h huvud. Detta ger oss de resurser vi behöver för seriell Port metoder. Vi definierar sedan två variablerna rxPin och txPin ha värdena 4 och 5 då vi skapar ett nytt objekt kallas mySerial med följande uttalande: SoftwareSerial mySerial = SoftwareSerial (rxPin, txPin);
Kan gå vidare till funktionen setup(). Lägg till följande rader med kod till botten av funktionen setup() (insidan klammerparenteserna {})
pinMode (rxPin, ingång);
pinMode (txPin, produktionen);
ställa in datahastigheten för SoftwareSerial port
mySerial.begin(9600);
PinMode() funktioner setup rxPin som indata och txPin som utgång. Vi sedan installationsprogrammet objektet mySerial för 9600 baud som den hastighet som vi vill kommunicera via serieporten programvara. Nu har vi bara lägga till en rad i vår loop() funktion:
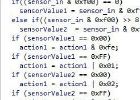
sensor_in=line_following.read_optical();
mySerial.println (sensor_in, HEX);
Precis nedanför sensor_in=line_following.read_Optical(); rad lägga till the:mySerial.println (sensor_in, HEX); kommandot
Kompilera och ladda upp dina program på din Robot.

Gör: it Robotics Starter Kit
Gör: it Robotics startkit - skicka Sensor Data trådlöst

Interaktiva Ambient Sensor med Intel Edison & Grove Starter Kit Plus
Komma igång med GearBest Starter Kit för Arduino

Murare burk brand start Kit

Starta och stänga datorn

Eld start Kit

Minecraft enkla Starter Kit för överlevnad spelare

Hydrokultur DROPP växande Starter Kit (med chili)
Gör: it Robotics startkit - analysera LineFollowing.ino del 2

Gör: it Robotics startkit-förare ombord förtrogenhet

Sup! Gemenskapens berättande uppleva IoT Kiosk

Intro till Robotics

Hemmet gjorde molekylär modell Kit

Komma igång för Arduino Kit (nybörjare)

Starter projekt 2 | Objekt som sensorer

Starter Project 3 | Sensing utrymmen

Hur du använder Tymkrs vända mig Kit
