Hur man gör en tre hjul fordon [robot chassi] (7 / 7 steg)
Steg 7: Steg 7: kamrem installation







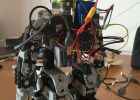
Efter att sätta på kamrem, kan du ansluta dessa tråd till din bottenplatta.
I den sista bilden tog jag av batterihållaren så du kan se mina anslutningar. Faktiskt tillhör tråden på Port 3 faktiskt Port 6. Du kan se det från min kod.
Arduino kod:
#include < Makeblock.h >
#include < Arduino.h >
#include < SoftwareSerial.h >
#include < Wire.h >
MeDCMotor Motor1(M1); Motorn på din tredje hjulet (med riktning motor)
MeDCMotor Motor2(PORT_2);
MeDCMotor Motor3(PORT_1);
MeDCMotor MotorDirection(M2); / / riktning motor
MeInfraredReceiver infraredReceiverDecode(PORT_6);
int ThreeMoveSpeed = 200.
int DirectionMoveSpeed = 50;
int MatchSpeed = 70.
Boolean leftflag, rightflag;
int minSpeed = 55.
int faktor = 23.
void setup()
{
infraredReceiverDecode.begin();
Serial.BEGIN(9600);
}
void loop()
{
IF(infraredReceiverDecode.buttonState() == 1)
{
Switch(infraredReceiverDecode.Read())
{
fall IR_BUTTON_PLUS:
Serial.println ("framåt");
(Framåt), //control tre motorer
bryta;
fall IR_BUTTON_MINUS:
Bakåt (), //control tre motorer
bryta;
fall IR_BUTTON_NEXT:
Svänghöger (); //control riktning motorer
bryta;
fall IR_BUTTON_PREVIOUS:
Svängvänster (); //control riktning motorer
bryta;
fall IR_BUTTON_9:
danceOneRound();
danceOneRound();
danceOneRound();
bryta;
fall IR_BUTTON_8:
testMoveRound();
bryta;
fall IR_BUTTON_7:
excursionWheel1();
bryta;
fall IR_BUTTON_6:
RunMotor3Back();
bryta;
fall IR_BUTTON_5:
RunMotor2Back();
bryta;
fall IR_BUTTON_4:
RunMotor1Back();
bryta;
fall IR_BUTTON_3:
RunMotor3Forward();
bryta;
fall IR_BUTTON_2:
RunMotor2Forward();
bryta;
fall IR_BUTTON_1:
RunMotor1Forward();
bryta;
standard:
Stop();
bryta;
}
}
annat
{
Stop();
}
}
void danceOneRound () //drive tre motorer och riktning motor för att göra bilen dansen
{
Motor1.Run(200);
Motor2.Run(-200);
Motor3.Run(200);
MotorDirection.run(200);
Delay(700);
MotorDirection.run(-200);
Delay(700);
}
void shake()
{
Motor1.Run(-250);
Motor2.Run(-180);
Motor3.Run(0);
}
void shake1()
{
Motor1.Run(-40);
Motor2.Run(-250);
Motor3.Run(-40);
}
void testMoveRound()
{
Motor1.Run(-250);
Motor2.Run(-70);
Motor3.Run(0);
}
void excursionWheel1()
{
Forward();
Delay(2000);
Motor1.Run(-250);
Motor2.Run(-250);
Motor3.Run(0);
Delay(2000);
Stop();
}
void (framåt) //control tre motorer
{
Motor1.Run(ThreeMoveSpeed);
Motor2.Run(-ThreeMoveSpeed);
Motor3.Run(-ThreeMoveSpeed);
}
utan laga kraft bakåt () //control tre motorer
{
Motor1.Run(-ThreeMoveSpeed);
Motor2.Run(ThreeMoveSpeed);
Motor3.Run(ThreeMoveSpeed);
}
void svängvänster () //control riktning motorer
{
MotorDirection.run(-DirectionMoveSpeed);
}
void svänghöger () //control riktning motorer
{
MotorDirection.run(DirectionMoveSpeed);
}
void RunMotor1Forward()
{
Motor1.Run(0);
Motor2.Run(-ThreeMoveSpeed);
Motor3.Run(-ThreeMoveSpeed);
}
void RunMotor2Forward()
{
Motor1.Run(ThreeMoveSpeed);
Motor2.Run(0);
Motor3.Run(-ThreeMoveSpeed);
}
void RunMotor3Forward()
{
Motor1.Run(ThreeMoveSpeed);
Motor2.Run(-ThreeMoveSpeed);
Motor3.Run(0);
}
void RunMotor1Back()
{
Motor1.Run(0);
Motor2.Run(ThreeMoveSpeed);
Motor3.Run(ThreeMoveSpeed);
}
void RunMotor2Back()
{
Motor1.Run(-ThreeMoveSpeed);
Motor2.Run(0);
Motor3.Run(MatchSpeed);
}
void RunMotor3Back()
{
Motor1.Run(-ThreeMoveSpeed);
Motor2.Run(ThreeMoveSpeed);
Motor3.Run(0);
}
void Stop()
{
Motor1.Run(0);
Motor2.Run(0);
Motor3.Run(0);
MotorDirection.run(0);
}
void ChangeSpeed(int spd)
{
ThreeMoveSpeed = spd;
}

Hur man gör en Tres leches kaka från scratch

Hur man gör en gaming hjul

Hur man rita Flippy (Happy tree vänner)

Hur man färga din skate hjul och bussningar

Hur man åter buffra en baitcasting hjul

Hur man gör en kvadrat hjul

Hur man gör en tre Tiered trädgård fontän

Hur man odlar en Mango Tree

Hur man gör en 2-hjul, IR-styrd, Arduino-kompatibel Robot

Hur man bygger en Arduino Powered Chess spela Robot

Hur man bygger en Lego Mindstorms NXT hexapod robot?
Hur man bygger en Raspberry Pi noll Humanoid Robot med Java

Hur man gör en Arduino Radio styrd Robot

Hur man utför en tre steg bränsle tjänst + hur man gör ett verktyg

Hur man sätter Roller Blade hjul på en Skateboard

Hur man gör en tree kjol

Hur man gör en tre-axeln CNC-maskin (billigt och enkelt)

Hur man Plasti Dip Jeep Wrangler hjul (utan att ta bort hjulen)
