Hur man rita bilder och skapa typsnitt med hjälp av exempelkoden Doodle Bot (1 / 6 steg)
Steg 1: Exempel kod kommandon

· Tur (vinkel)
· Up()
· Down()
Gå (x):x är ett heltal som anger antalet steg roboten bör ta. Eftersom hjulet kodare ändra tillståndet 8 gånger (4 hög och 4 låg) per hjulvarv är varje steg lika med 1/8 av hjulets omkrets. Detta är lika med ca 15,7 mm.
Den variabla charsize används som en multiplikator och som standard har värdet 1. Om du ändrar det till exempel så att charsize = 3 då meddelandet / bilden är 3 gånger större och varje steg blir ca 47.1mm.
Tur (vinkel): vinkel är ett heltal som anger vridningsvinkel. Alla positiva värden orsaka roboten att vrida medurs. Ett negativt värde kommer att orsaka roboten att vrid moturs. Detta kommando är krångligare att använda eftersom det finns två olika sätt roboten kan vända.
Vrida metod 1: Den första metoden stoppar en motorisk och driver andra motorn framåt eller bakåt. Denna metod ger det största antalet möjligt vinklar men eftersom roboten lutar ca 1 hjul är det svårare att justera pennan med sin tidigare ståndpunkt.
Vrida metod 2: Den andra metoden driver en motor fram och en motorisk bakåt. Denna metod ger hälften så många vinklar men eftersom roboten lutar om centrum av hjulen är det lättare att justera pennan med sin tidigare ståndpunkt.
Exempelkoden använder den första metoden för vinkel värden från –31 till + 31. Detta gör alla möjliga vinklar tillgängliga. Dessa vinklar visas i blått.
Positiva eller negativa värden från 32 till 40 orsaka roboten att slå med den andra metoden som visas i rött.
Om man tittar på exempelkoden kommer du se att du även kan ange värden 45, 90,135,180, 225, 270, 315 och 360. Koden konverteras automatiskt dessa värden till deras motsvarande värdet med den andra metoden av roterande.
Exempelkoden kompenserar för pennan inte monteras direkt mellan hjulen och kommer ihåg om pennan var upp eller ner på tiden en sväng var görs automatiskt.
Up(): Detta kommando höjer pennan.
Down(): Detta kommando sänker pennan.
Exempelkoden omfattar en Stop() funktion emellertid detta kommando inte behövs för ritning och används endast inom kommandona Turn(angle) och Go(x) för att säkerställa encoder noggrannhet.
Det finns också en End() funktion som sätter roboten till en ögla där det gör ingenting tills reset-knappen trycks. Detta kan användas i slutet av texten eller bilden för att stoppa roboten från upprepa funktionen loop().

Hur man rita moln och gräs snabb och enkel teknik
Hur man använder och Arduino shield med Raspberry Pi

Hur man identifierar PNP och NPN-transistorer (med en enkel krets)

Hur man rita (väl del ett)

Hur man rita Artemis (Young rättvisa)

Hur man rita Robin (Young rättvisa)

Hur man rita Justin (Total Drama Action)

Hur man rita Superboy (Young rättvisa)
Hur man rita Vicky (The ganska OddParents)
Hur man rita och färglägga en Cougar
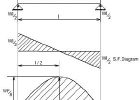
Hur man beräkna och rita skeva och Böjande ögonblick diagram

Hur man gör en boll kvarn med lego och en pvc pipe--inkluderar digital design fil

Hur man ladda ner och använda Spotify på en dator med Windows

Hur man rita skönheten och odjuret

Hur man gör och slutföra personlig namn plattor med bikupa papper Quilling
Hur man konstruerar serie och parallell elektriska kretsar med krets byggsats programvara.
Hur man gör en tornerspel pinne med 2 litersflaskor och PVC-rör

K40 Laser skärare: hur man skära och gravera i ett jobb
