IoT rörelse kontrollerad servon (6 / 10 steg)
Steg 6: Pi till Servo Driver anslutningar

Pi kan användas för att direkt driva servon, men detta är inte lätt. Det finns en dedikerad PWM kanal, men vi behöver 4. Det kan vara falsk i programvara, men återigen, detta är inte det lättaste att göra. Att vara en dator, är Pi mycket bättre på högre nivå bearbetning än lågnivåkontroll. Du kan säkert använda någon PWM drivrutin för detta steg, men jag använder denna 16 kanal, 12 bit föraren form Adafruit. Ja, det är overkill, och ja, det är lätt att programmera en ATtiny24 att befalla 4 servon vid kommunikation på I2C bussen. Jag uppmuntrar dig att skapa dina egna, men det är utanför omfånget för denna guide!
Det finns gott om online tutorials att komma igång med detta forum, och du behöver några ytterligare källkodsfiler. Dessa kan hittas i Pi katalog med källa koden databasen - berättar filerna "Adafruit..." Pi hur man talar med PWM föraren.
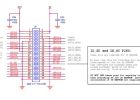
Det är lätt att ansluta Pi till styrelsen. Pi: s I2C linjer finns på stift 3 och 5, men du måste också aktivera I2C kommunikationskanalen om du inte gjort det redan. En viktig ingångsstift är märkt "OE." Detta är en aktiv-low "output enable" PIN-kod. Servon aktiveras endast när detta stift hålls låg. Den kan kopplas direkt till marken, eller drivs från en annan av Pi: s IO pinnar. I detta projekt kör jag faktiskt det från ATmega328p matrix styrkrets som också förbinder till R Pi med I2C data rader.
I diagrammet, är en servo knuten till kanal 1 av PWM-drivrutinen. I projektet, ställa in servon som så:
- Kanal 0 är vänster Yaw (Pan)
- Kanal 1 är vänster Pitch (lutning)
- Kanal 2 är rätt Yaw (Pan)
- Kanal 3 är rätt tonhöjd (lutning)

Rörelse kontrollerade ljusshow

Skapa din egen rörelse kontrollerade robot

Rörelse kontrollerad ultraljud lampa

Intellekten IoT Edison web kontrollerad LED

Hercules: Rörelse kontrollerade Android roboten

LEAP rörelse kontrollerad Remote Search och bortskaffande Robot

Rörelse kontrollerade utlopp

Rörelse kontrollerade Outlet - från en rörelse sensing ljus

Rörelse kontrollerad RGB ledde kostym med Xbox 360 Kinect, Max MSP och Arduino Del1

Raspberry Pi Google kalender med rörelse kontrollerade webkamera och väder
WiiMote kontrollerade servon med RaspberryPi

Bygga ett Portal torn med rörelse kontrollerade ljud och belysning

Hand rörelse kontrollerade R/C bil

Internet kontrollerad lampan med ESP8266 wifi relay IoT

IoT Photon + språng rörligt Robot

Rörelse, styrda robotarm

Arduino kontrollerade rum värmesystem

TBT2000 Airsoft BB kanontorn Tool box
