Rörelse, styrda robotarm








Arm:
Detta instructable visar processen för att bygga en robotarm med servon, Arduino mikroprocessor, ett gyroskop och flera bend sensorer.
Användaren bär en handske som innehåller gyroskop och böj sensorerna som översätter förflyttning av användare handen i rörelse av servon, i sin tur roterande handled och hand av robotarmen.
Underarmen har full rörelse med mänskliga handleden nämligen: rotation, radiella avvikelsen (rörelse mot tummen), ulnar avvikelse (rörelse mot lillfingret), flexion (luta mot handflatan) och tillägg (luta mot baksidan av handen).
Handen har också rörligheten i fingrarna, detta är begränsad till följd av det spröda material som används.
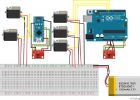
All rörelse är från servon bifogas en förlängning tråd eller pianotråd. Var och en med olika vridmoment beroende på sin position.
Fingrarna innehåller touch känsliga motstånd som ger haptisk återkoppling och tillåter användaren att veta när fingrarna har förstått ett objekt.

Gest styrda robotarm

Hur man styr en Arduino styrda robotarm av Dobot teamet

1Sheeld styrda robotarm
Styrda robotarm med gester

Joystick styrda robotarm med en Arduino

PS3 styrda robotarm

Interaktiva sökvägen följande robotarm med pfodApp

Fjärrstyrda robotarm (MeArm) med pfodApp

Bluetooth kontrollerad arduino robotarm

DIY protetiska Hand & underarmen (röst kontrollerat)

Några av mina projekt

1Sheeld kontrolleras Arduino fordon

Handgesture styrd robot med robotarm

Skulptur Robot (del 3 av 9): barn cykel förstörelse för robotarm delar

3D tryckt robotarm

Arduino robotarm

En multi kontrollerad hög Precision stationära robotarm

Actobotics egen robotarm
