Jorden världen roterar med Arduino eller Raspberry Pi kontrollerade Stepper Motor (6 / 6 steg)
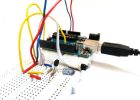
Steg 6: Limma föraren på basen

Njut av
Den bifogade uppförandekoden kan läsas på en Arduino att fungera motorn.
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
void setup() {
pinMode (IN1, OUTPUT);
pinMode (IN2, OUTPUT);
pinMode (IN3, OUTPUT);
pinMode (IN4, OUTPUT);
}
uint64_t timeMultiplier = 24 * 60 * 1; som ger dig ~ ett varv per minut.
uint64_t msPerDay = 24ULL * 3600ULL * 1000ULL;
uint64_t divideForStep = 64ULL * 48ULL * timeMultiplier;
Double nextTimeStep = 0;
void loop() {
statiska osignerade långa zeroTime = millis();
uint64_t curTime = millis() - zeroTime;
om (curTime * divideForStep > nextTimeStep) {
nextTimeStep += msPerDay;
stepper(true);
}
}
inline void stepper (bool normalRotation) {
statisk int steg = 0;
Steg += 8 + (normalRotation?-1: 1);
Steg % = 8.
Switch(Steps) {
fall 0:
digitalWrite (IN1, låg);
bryta;
fall 1:
digitalWrite (IN3, hög);
bryta;
fall 2:
digitalWrite (IN4, låg);
bryta;
fall 3:
digitalWrite (IN2, hög);
bryta;
fall 4:
digitalWrite (IN3, låg);
bryta;
fall 5:
digitalWrite (IN1, hög);
bryta;
fall 6:
digitalWrite (IN2, låg);
bryta;
fall 7:
digitalWrite (IN4, hög);
bryta;
standard:
bryta;
}
}

Snabb Digital termometer med billiga USB till TTL omvandlare och DS18B20 - utan Arduino eller Raspberry Pi
Läs/emulera fjärrkontroller med Arduino och Raspberry Pi

Piano trappor med Arduino och Raspberry Pi

En trådlös Smart Home (var: hem simulator och larm med Arduino eller Atmega328 (Uppdaterad maj 2016))

Hur man mäter AC nuvarande med Hall effekt Sensor med Arduino eller andra gemensamma Microcontrollers

Arduino/Android BLUETOOTH - 28BYJ 48 Stepper Motor gardin kontroll APP

Bygga din Internet kontrollerad Video-Streaming Robot med Arduino och Raspberry Pi

Styra en Furby med Arduino (eller andra mikrokontroller)

Fyra kanal 'Fake TV' med Arduino eller Attiny

Humanoid Robot tonande kontrolleras med Arduino Mega, raspberry Pi och 1Sheeld

Hur man gör en mobiltelefon och dator kontrolleras 3D tryckta Robot med Arduino - IoBot.

Att man gör en DIY borstlös Gimbal med Arduino

PIR rörelsedetektor med Arduino: Drivs på lägsta energiläge som konsumtion

Kontrollera enkelt LED stapeldiagram med Arduino

Styrning av motorer med Arduino

Fotocell reagerar på ljus som ett öga. ett inledande projekt för bearbetning med Arduino

DHT11 Luftfuktighet Sensor modul gräns flat med Arduino

DIY Robot Arm robotiserade 3D skrivare Plotter ritar hemgjord ram med 2 Stepper Motor
