Kontroll DC och stepper motors med L298N Controller moduler med dubbla motorer och Arduino (3 / 3 steg)
Steg 3: Kontrollera en stegmotor med Arduino och L298N

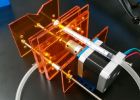
Stegmotorer kan tyckas vara komplexa, men inget kunde vara längre än sanningen. I detta exempel kontrollera vi en typisk NEMA-17 stegmotor som har fyra trådar, som visas i bilden på detta steg.
Det har 200 steg per varv, och kan verka vid 60 RPM. Om du inte redan har värdet steg och hastighet för din motor, ta reda på nu och du behöver det för skissen.
Nyckeln till framgångsrik stepper motorisk kontroll är att identifiera kablarna – som är vilken som är vilken. Du kommer att behöva bestämma A +, A-, B + och B-tråd. Med vårt exempel motor detta är röd, grön, gul och blå. Nu låt oss få ledningarna gjort.
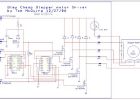
Anslut den A +, A-, B + och B-tråd från stegmotor modul anslutningar 1, 2, 13 och 14 för respektive. Placera byglarna ingår i L298N modulen över par på modul punkterna 7 och 12. Sedan ansluta strömförsörjningen som krävs till punkt 4 (positiv) och 5 (negativ/GND).
Än en gång om din stegmotor strömförsörjning är mindre än 12V, passa bygel till modulen vid punkt 3 som ger dig en snygg 5V strömförsörjning för din Arduino. Anslut L298N modul pins IN1 och IN2, IN3 IN4 till Arduino digital stift D8, D9, D10 och D11 respektive.
Slutligen Anslut Arduino GND till punkt 5 på modul och Arduino 5V till punkt 6 om sourcing 5V från modulen. Styra stegmotor från dina skisser är mycket enkelt, tack vare Stepper Arduino biblioteket ingår i Arduino IDE som standard.
För att visa din motor, helt enkelt ladda stepper_oneRevolution skissen som ingår i Stepper biblioteket. För att hitta detta, klicka på filen > exempel > Stepper menyn i Arduino IDE.
Slutligen, kolla värdet för
CONST int stepsPerRevolution = 200.
i skiss och ändra 200 till antalet steg per varv för din stegmotor, och även hastigheten som är förinställt till 60 RPM i följande rad:
myStepper.setSpeed(60);
Nu kan du spara och ladda upp skiss, som kommer att skicka din stepper motor runt ett varv, sedan tillbaka igen. Detta uppnås med hjälp av funktionen
< p > myStepper.step(stepsPerRevolution); för medurs < /p >< p > myStepper.step(-stepsPerRevolution); för moturs
Slutligen, en snabb demonstration av vår test-hårdvara visas i videon på detta steg.
Så där har du det, en lätt ett billigt sätt att styra motorer med din Arduino eller kompatibel styrelsen. Och om du gillade den här artikeln, eller vill införa någon annan till en intressant värld av Arduino – kolla min bok (nu i en fjärde utskrift!) "Arduino Workshop".

KONTROLL STEPPER MOTOR hastighet med LABVIEW och ARDUINO

Kör en Stepper Motor med en Arduino och en A4988 Stepstick/Pololu drivrutin

Bi Polar Stepper Motor med L293D och Arduino

Kontroll av en DC motor med Arduino och Visual Basic

Dansar Tippy med arduino och stepper motor

Attiny85 som steg/Dir Stepper Motor Controller
Lätt att bygga CNC Mill Stepper Motor och Driver kretsar

Trä Gear Clock med Stepper Motor Drive

Arduino/Android BLUETOOTH - 28BYJ 48 Stepper Motor gardin kontroll APP

Arduino bibliotek för 28BYJ-48 Stepper Motor och ULN2003 Driver

Jorden världen roterar med Arduino eller Raspberry Pi kontrollerade Stepper Motor

Stepper motor - använda den billigaste och easyest

Quiz Game Controller med hjälp av "Ljus och ljud Buzzers" och Arduino

PIR-SENSOR med ARDUINO aktivera STEPPER MOTOR

Flytta en Motor med hjälp av Arduino och seriell kommunikation

DIY Robot Arm robotiserade 3D skrivare Plotter ritar hemgjord ram med 2 Stepper Motor
DIY Robot Arm Robotic Draw hemgjord ram med 2 Stepper Motor

Kör en Stepper Motor med en AVR mikroprocessor