Konvertera en unipolär stegmotor till bipolär (2 / 3 steg)
Steg 2: Fastställande av det motoriska pinout




Med så många trådar det är så mycket varians i ansluta den kan alla en snabbt frustrerad tabell flip. Pinout är relativt lätt att avgöra för 4-pin bipolär motor, är det inte så mycket så för 8-pin. Men bli inte rädd av motorns ny tråd skägg bredd, det är allt lösas av varje elektronisk butik bosatt verktyg-oscilloskop. (Om du inte har fått en - få en).
För det första måste du bestämma spole ändarna. I 8-pin finns 4 spolar med 2 svansar vardera, vilket ger dig 4 * 2 = 8 pins, duh. Ta din multimeter och byta till motstånd mäta läge. Logiken är enkel: ledningar som inte tillhör samma spolen skulle ge dig ingen anslutning medan ledningar som är svansar av samma spolen kommer att visa dig några lågt motstånd (~ 70 ohm i mitt fall). Gör en lista: A B C D för spolar och antalet par stift. Gillar det här:
A = 1 7
B = 2 4
C = 3 6
D = 5 8
Då måste vi bestämma placeringen av varje spole inuti motorn. Jag vet att vi kunde bara öppna den och ta en looksie, men detta är: a) inget roligt, b) ledningar det är hår tunna och ser likadana ut och c) jag har redan drivs upp ett oscilloskop här. Anslut kanal 1 för scope till ett slumpmässigt par slumpmässiga polaritet. Anslut kanal 2 till ett annat random par i en annan random polaritet. Och nu, ge motorn en liten snurra i vilken riktning. Som jag fick höra av en fet dam i min 6: e klass fysik klass, spinning en permanent magnet nära dirigent genererar en ström i denna ledare – detta är precis vad vi ska se på omfattning: två vågiga mönster.
Det finns tre alternativ av vad du kommer att se:
- Två linjer kommer att vara i sync detta i huvudsak innebär du har hittat mittemot spolar som sitter mot varandra, men du fick polariteten på en av dem bakåt.
- Två rader slår i exakt motsatta riktningar är detta samma sak, men denna gång du har räknat rätt polaritet.
- Linjerna är något ur synk betyder spolar du sondera sitter 90 grader från varandra.
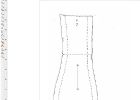
Om du, säg, sätta ch1 sonden på spole A och ch2 på spolen D att få sådan bild, det skulle betyda spolar ligger såhär i en motor:
D D
A?? eller?? A
?? ??
Det spelar verkligen ingen roll om det är exakt bild av hur spolar är belägna i motorn från den bästa sidan ned – så länge alla relativa positioner bestäms motor kommer att snurra.
Nu, efter du har finns varje spole i motorn i förhållande till varandra, är det dags att räkna ut polariteter av dessa spolar. Igen, som med positioner-allt är relativ så det spelar ingen roll om du får hela motorn bakåt-så länge alla relativa polaritet begränsningar är uppfyllda motorn kommer chooch bara bra. Med detta sagt, ta en slumpmässig spole och absolut godtyckligt ringa en av dess ändar en + och en annan en-. Markera dem på pinut tabellen:
1 = A +
7 = A -
Nu Lägg en kanal 1 räckvidden på den i polariteten du bara guesstimated och kanal 2 till spolen som ligger på motsatt sida av motorn mot det i godtyckliga polaritet. Snurra motorn medurs något. Det är viktigt att snurra motorn endast i en riktning att inte kringgå provningsvillkoren. Om du ser absolut synkron graf på räckvidden – du kopplat spolen 2 i samma polaritet, hjälpmedel oavsett din räckvidd om ansluten till är rätt polaritet. Om två diagram du ser är helt motsatta – din polaritet på omfattning kanal 2 är bakåt (inte en dålig sak). Nu kan du sätta polariteter för den andra spolen i tabellen:
5 = D -
8 = D +
Nu måste du bestämma relativa placeringen av sidan spolarna. Det är, är spolen C till vänster eller till höger till spole D i mitt exempel.
Bestämmer det är ganska enkelt: om du sätter en räckvidd kanal 1 på spolen A avseende polaritet du har fastställt och kanal 2 på spolen C i en godtycklig polaritet ser du ett diagram #3 av bilderna: två grafer är 90 grader i otakt. Och här är den svåra biten: om din kanal 2 graf (en med godtyckliga polariteter) kommer före kanal 2 så har du polariteten rätt. Om inte – du fick det bakåt (återigen, inte en dålig sak).
Nu du lägga den till tabellen pinut och det är nu komplett!
1 A -.
2 B +
3 C -.
4 B -.
5 D -.
6 C +
7 A +
8 D +
Se upp så att även min motor pinut är såhär, det betyder inte att din måste vara sådan. I själva verket någon bekant med min lödning färdigheter nivå skulle säga min pinut är bisarra (och förmodligen skulle råda dig att inte lita på någon av mina instructables, alltför).

Ansluta stegmotor till arduino

Konvertera dina papper båt till en motor / hastighet båt.

Konvertera (nästan) alla mediefiler till (nästan) alla andra mediefiler gratis!

Konvertera gamla dynamo strålkastare till LED cykel ljus

Konvertera en trådmatning svetsare till en Stick svetsare

Konvertera en leksak klo/gripdon till servo kontrollerad

Konvertera en laptop IDE-enhet till en prisvärd Compact Flash SSD.

Konvertera en gammal RC bil till borstlös

Konvertera en trä bogserbåt till liveaboard
Konvertera ett papper mönster till en Laserable fil
Konvertera EPub formaterade böcker till användning på Kindle
Konvertera nummer från decimaltal till binärt

Konvertera en tåg tabell till en konstruktion zon tabell

Konvertera en spolats upp pendelbuss till den ultimata familjen äventyr mobil

Konvertera en Google Sketchup Design till DXF-format

Konvertera en HG658 Huawei Router till en Repeater

Konvertera en TowerPro MG995 Servo till ett linjärt ställdon

Konvertera en 1.44MB diskett till 720K
