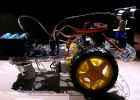
Låg kostnad, Arduino-kompatibel ritning Robot (12 / 15 steg)
Steg 12: Testning och kalibrering




Förhoppningsvis du redan lagt upp firmware i steg 2. Om inte, gör det nu.
Test firmware drar bara en ruta flera gånger så vi kan kontrollera riktning och noggrannhet.
- Placera din robot på en slät, plan, öppen yta.
- Slå på strömmen.
- Titta på din robot Rita fyrkanter.
Om du inte ser lamporna på mikrokontroller, gå tillbaka och felsöka makt som i steg 8.
Om din robot inte går, dubbelkolla strömförsörjningar till darlington föraren i steg 9.
Om din robot rör sig oregelbundet, dubbelkolla pin-anslutningar för mikrokontroller och darlington föraren i steg 10.
Om din robot rör sig i en ungefärlig square, är det dags att sätta några papper ner och sätta en penna i den (bild 1).
Dina kalibrering poäng är:
flyta wheel_dia = 66.25; mm (öka = spiral ut)
flyta wheel_base = 112; mm (öka = spiral)
int steps_rev = 128; 128 för 16 x växellåda, 512 till 64 x växellåda
Jag började med en uppmätt hjuldiameter 65 mm och du kan se rutorna rotera inåt (bild 2).
Jag ökade diametern till 67, och du kan se det roterande utåtgående (bild 3).
Så småningom kom jag på en värdera av 66.25 mm (bild 4). Du kan se att det fortfarande finns några inneboende fel på grund av redskap lash och sådant. Nära nog att göra något intressant!

UDuino: mycket låg kostnad Arduino kompatibel Development Board

Steg för steg guide till Micro trollkarl robot controller (Arduino kompatibel)
YourDuino: Grundläggande Arduino-kompatibel att undvika kollision Robot

Arduino ritning Robot

Med en Arduino ritning Robot med timme av koden Tutorials
Hur till DIY klo kran Arduino-kompatibel Robot?

Tacuino: en låg kostnad, modulära, Arduino-kompatibel pedagogiska plattform

Snabb och lätt Arduino kompatibel H-bridge sköld

LED Dawn / Sunrise väckarklocka, nattlampa & säkerhet ljus - Arduino kompatibel

Ritning Robot

Perfboard Hackduino ($8 Arduino-kompatibel krets)

Cirkelträning Scribe ritning Robot

Hur man skapar en Arduino kompatibel Bluetooth 4.0 modul

Gör din egen anpassade Arduino kompatibel

Använd RFduino att köra Arduino kompatibel skisser och kommunicera med din iPhone med Bluetooth 4.0 lågenergi.

Hur set av brödunderläggen Arduino kompatibel.

Enkel ritning Robot för barn

Arduino kontrollerade Servo Robot (serbiska)
