Lätt, reversibel Motor Control för Arduino (eller någon mikrokontroller) (2 / 14 steg)
Steg 2: Schematisk och teorin om Operation

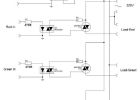
Motorn är kopplad till både normalt sluten och normalt öppen (i omvänt) sidor av reläet. Detta vänder i kraft ledningarna när reläet är aktiverade eller avstängda.
Eftersom mikrokontroller ganska inte kan producera tillräcklig ström för att driva reläet - används en transistor (TIP120) för att slå på och av.
"Basen" på den första TIP120 är "Riktning Pin" - slå på den och av växlar riktning mot motorn.
En andra TIP120 växlar makt till gemensamma på reläet. Detta används för att aktivera motorn och inaktivera.
"Basen" på den andra TIP120 är "Aktiverar Pin" - förhandslyssna på orsakar motorn att faktiskt köra.
Aktivera PIN-koden kan slås på och av mycket snabbt för PWM (pulse bredd modulering) hastighetskontroll.
Både kontroll stift är anslutna till mikrokontroller via 220 Ohm motstånd att begränsa nuvarande.
Den minsta spänningen att köra denna krets bestäms av den "pickup" spänningen i reläet. Anges detta med 9.6v - men jag har funnit det att fungera ordentligt så låg som ca 7.5v.
Oroa dig inte om schematiskt gör totala vettigt. Vi ska gå igenom alla anslutningar en-för-en.
BLDC Motor Control med Arduino, bärgades HD motor och hallgivare

Arduino Joystick sköld Nrf24l01 trådlös 2 Dc-Motor Control--RC bil projekt del 1

Arduino Joystick 2 Dc-Motor Control

Jorden världen roterar med Arduino eller Raspberry Pi kontrollerade Stepper Motor

Remote Control bil med Arduino och Bluetooth

Styra DC Motors(PC Fans) med Arduino och Relay board

Styra en Furby med Arduino (eller andra mikrokontroller)
3 kanal-Dimmer/fader för Arduino eller andra microcontroller

Hur man mäter AC nuvarande med Hall effekt Sensor med Arduino eller andra gemensamma Microcontrollers

Snabb Digital termometer med billiga USB till TTL omvandlare och DS18B20 - utan Arduino eller Raspberry Pi

TV kill strömbrytare, Arduino Tv-B-Gone!

DIY Arduino eller "Den DIY-Duino"

En trådlös Smart Home (var: hem simulator och larm med Arduino eller Atmega328 (Uppdaterad maj 2016))

28BYJ-48 Stepper Motor Control System baserat på Arduino med ULN2003 Chip
Arduino Stepper Motor Control

Servo Motor Control Arduino kommunikation med MATLAB

Enkla Stepper Motor Driver för Arduino CNC projekt

$1 motor styrkrets för Arduino
