Leksak att hinder Avoider (2 / 4 steg)
Steg 2: Lägga till Ping sensor och H-Bridge


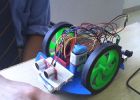
Jag behövde i princip en H-brygga, en Arduino Uno och Ping sensor.
Det första jag gjorde var montera Ping sensorn på toppen av tanken. Jag använde bara en bit av skum och limmas varm det till toppen av tanken. Jag var också tvungen att borra ett hål i toppen av tanken att få 4 trådar från sensorn till Arduino inne i tanken. Jag skulle montera givaren på en servo och har det sveper fram och tillbaka, men 4-pin sensorn tycktes ha en ganska bred vinkel täckning så jag inte behöver.
Obs: Du kan också använda en 3 pin ultraljud Ping sensor, men jag hittade det hade ett mycket smalare synfält framför tanken. Jag slutade med en 4-pin sensor.
H-bron är ganska enkel att ansluta också. Det finns 2 terminaler för varje motor. Så ansluten jag bara vänstra motorn på vänster sida av H-bron. Och rätt motor till höger. Det finns 3 terminaler som är var power levereras; och även en 5v utgång. Jag kopplade batteriet (som var en del av botten av tanken) till H-bron. Den röda kabeln var ansluten till den + terminal på H-bron och den svarta kabeln var ansluten till marken (-). Om du inte vet vilken tråd är positivt och som är negativ på ditt batteripack bara ta en testare och testa spänningen. Testaren visar ett - värde om du håller leder på testaren bakåt.

Hinder avoider med hjälp av IR-sensor

Arduino hinder avoider robot [EASY!]

En leksak att leva i

Hinder Avoider med HC-SR04 Ultrasonic Sensor

Hinder Avoider Robot använder Arduino Uno och IR-närhet Sensor

DTMF-baserade hinder AVOIDER ROBOT

Hinder Avoider Robot använder Relay Board
AUTONOMA hinder AVOIDER

Hur man gör ett hinder att undvika Arduino Robot

Sonic leksak som är riktigt roligt att göra och använda

Enkla sätt att gå runt böja en leksak

5 leksaker som snurra!

Skräddarsydda kattmynta katt leksak

Animera en leksak eller stickning projekt med en leksak skelett

KL250 Från glömt att trafiksäkra (icke-teknisk)

Animais feitos de Caños de PVC • PVC Pipe djur leksak

Flaska snurra leksak

Rainbow Baby stapling leksak
