Ljus Ring på undervattensrobot--del 2 (CNC Mill) (1 / 5 steg)
Steg 1: Workholding och centrering


I en tidigare prototyp, hade jag monterat den hela 4.-axeln (inte bara käkarna) vänd uppåt. Detta till slut blev för lång för montering auto-avlyssning mekanismen i maskinen. Så för min del var det bättre med bara käkarna.
Jag centrerad delen med en kant finder med en teknik som liknar som från denna två minuters YouTube-video. Men denna metod är också felaktiga för denna del--det kan lämna vissa funktioner så mycket som 0,005" off center, som på denna del skulle orsaka några hål avfasningar att börja köra i en o-ring spår.
Så efter grov-centrering gick jag runt spåret med dial indikator (bild 2). Under detta steg upptäckte jag att Tormach PCNC 1100 har om en du av glapp mellan DRO (digital läsa) och tabellen. Med andra ord, beroende på några faktorer, kan maskinen vara ungefär 0,001" bort från där den tror att det är.
Enligt min erfarenhet, de flesta maskiner med DRO'S reference själva tabellen, så de inte har denna typ av bakslag beteende. Min gissning är att positioneringen på denna maskin bygger bort av kodare på stegmotorer. Brister i enheten tåget sedan införa motreaktion.
För att vara rättvis, är Tormach PCNC 1100 mycket bra på att vara vad det ska vara - en prisvärd, hobby-grade CNC mill.

Ljus Ring på undervattensrobot--del 1 (svarv)

Vägg monterbar brädspel Design för CNC Mill

Solidoodle 2 (2nd Gen) till CNC Mill konvertering

Millow: 3D fräsning en T-spline kropp med uppfinnaren HSM och Haas CNC Mill

Gör din egen PCB på en billig stationär CNC mill

CNC mill projekt. Jag gjorde det på TechShop-Detroit

Hur man gör ett träsnitt från... ett foto av ett träsnitt med din CNC mill

Göra en fjäderbelastad "touch block" för att ange höjden verktyg (z-axeln) på en CNC Mill eller Router.

Hemgjord trä Mini svarv DIY dubbdockan borrmaskin spindel CNC Mill maskin
3D printed CNC mill

Skräddarsydd knoppar på din CNC Mill

Den fantastiska plast CNC Mill

3D tryckt Desktop CNC mill
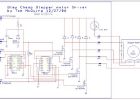
Lätt att bygga CNC Mill Stepper Motor och Driver kretsar

Grundläggande nybörjare mini 3 axel CNC mill

Domo - storformat cnc mill
5 axel stationär CNC Mill

Cnc milled glow in the dark table
