Lobsterbot - en enkel LM386 baserad robot (2 / 4 steg)
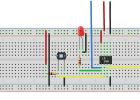
Steg 2: delar - kretsen








1. 1 x 2222A transistor (liknar 3904, svart sak w / 3 tråd)
2. 1 x LM 386 låg effektförstärkare (chip w / 8 trådar)
3. 1 x dpdt relä (svart w / 10 trådar)
4. 2 x motorer
5. 1 x 1 k motstånd (brun - svart-röd band)
6. 1 x 10 k motstånd (brun - svart - orange band)
7. 1 x 100uF kondensator (blå sak)
8. 1 x röd LED
9. 1 x Vippbrytare
10. jag använde två plast batteri lådor, som rymmer 2 AA-batterier
11. dubbelsidig klibbiga skum
12. 2 x photodiodes- Jameco och andra har dem på lager
Här är en trevlig och enkel en sida beskrivning av kretsen. Den går även igenom några fel i den göra tidningen Herbie och Instructable version.
Jag lödas ihop min krets på en bit av perfboard som jag mätt för att passa mellan chassi och servon.
Servon var bultad till chassit med 3/8" #6 bultar och muttrar. Sedan fästes två servon med en bit dubbelhäftande skumtejp, vilket är anmärkningsvärt stark.
Jag tog bort "hjärnan" i varje servo och lödda bara två kablar direkt till motorn. Detta sätt inte behöver du PWM signaler att köra servon, de bara går!

GOduino III - skärbräda-vänlig Arduino-baserad robot controller

SUPER ENKEL NYBÖRJARE ROBOT II (ARDUINO UNO VER.)

Arduino baserade Robotic Car(wireless controls+Autonomous)

Arduino-baserad robot med IR radar

Bygga en enkel LEGO starter robot

Enkel linje efter robot

Domo Kun WobblyBot, enkel självbalanserande Robot

Crawli - en enkel Walking mjuk Robot

Extremt enkel linje efter Robot med Arduino

Enkel och billig ROBOT HAND med endast en MOTOR!

Super enkel nybörjare Robot!

Enkel 2 benta robot

En enkel linje efter robot med transistorer

Enkel automatisk flytta Robot använder arduino & L293d IC

LM386 baserade förstärkare med ljud känslig LED

Ligth efterföljare Arduino baserad Robot

Att göra en enkel RC Camel Robot

Snabb enkel liten vibrerande Robot (nr lödning)