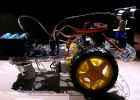
(med Video) Grundläggande Arduino Robot, ljus sökare! (6 / 8 steg)
Steg 6: äntligen! Motorisk kontroll!



Använda digitalWrite(), kan vi växla transistorer på och av genom att vrida motsvarande stift högt eller lågt.
Detta kommer att endast byta motorn på och av i en riktning. Vi behöver en H-bro att ha full kontroll över en motor.
Vi kommer inte att använda en H-Bridge i denna Insctructable.
Anslut ena änden av en 1 k ohm motstånd till stift 2 (rätt motor). Anslut den andra änden till en tom rad på en skärbräda. Lägg till transistorn, justera bas terminalen av transistorn med avsluta av motståndet och infoga den i samma rad i motståndet. Anslut samlaren till ett stift av högra motorn. Anslut sändaren (återstående pin) till marken. Anslut den andra pin av motorn till den positiva Polen på batteriet. Upprepa för den vänstra motorn på stift 3. Också, Anslut den negativa terminalen av batteripaketet till marken stift på Arduino.
Här finns funktionerna för att få din robot flyttar.
Stege:
digitalWrite (RightMotor, hög);
digitalWrite (LeftMotor, hög);
Vänster:
digitalWrite (RightMotor, hög);
digitalWrite (LeftMotor, låg);
Höger:
digitalWrite (RightMotor, låg);
digitalWrite (LeftMotor, hög);
Märker att vända, måste du aktivera motsatsen motor på.
YourDuino: Grundläggande Arduino-kompatibel att undvika kollision Robot

Förbättra din Ultimate Frisbee spel med dessa grundläggande kasta tekniker

Lätt grundläggande Arduino Ethernet Controller
Med chipKIT grundläggande i/o-sköld med Analog RGB Strip LED

Fotografera snöflingor med en grundläggande point-and-shoot kamera

Grundläggande Arduino början krets

Grundläggande Arduino blixtljus

Lektion 4: Grundläggande Arduino Pt. 2: Introduktion till kodning

Grundläggande Arduino Tutorials: 01 blinkande LED

Grundläggande Arduino tid och datumvisning

Gör ditt hem Imporvement projekt enklare med denna grundläggande råd

Grundläggande NXT robot, första försöket

RC bil till autonoma Arduino Robot

Arduino nybörjare och grundläggande elektronik Kit Primer

Bygga en Gaming dator, eller lära sig de grundläggande delarna

Android-utveckling: Att skapa en grundläggande kalkylator

Grundläggande Zippo öppning knep

4 grundläggande kommandon för att göra ritningar i AutoCAD: Använd dem för att rita en stjärna
