Mekaniska blomma (med Arduino) (5 / 7 steg)
Steg 5: Skriva koden för arduino och koppla sensorer


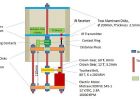
Bifoga din servo och motion sensor till din skärbräda och Anslut i till arduino (eller funduino) styrelsen. Detta är koden:
#include
#include servo myservo;
#define PING_PIN 12 # define PING_PIN2 11 / / Arduino PIN-kod knuten till både avtryckare och echo pins på ultrasonic sensor. #define MAX_DISTANCE 250 / / maximalt avstånd vi vill skicka ping (i centimeter). Maximal sensorn avståndet är dimensionerade för 400-500cm.
NewPing sonar (PING_PIN, PING_PIN2, MAX_DISTANCE); NewPing inställning av stift och maximalt avstånd.
int pos = 0; variabel att lagra servo position booleska checken = 0; unsigned int oss = 10; void setup() {myservo.attach(9); Serial.BEGIN(9600); tillmäter objektet servo servo på stift 9}
void loop() {int itemp = oss / US_ROUNDTRIP_CM; if(check == 1) {för (pos = 0; pos < = 180, pos + = 1) {/ / går från 0 grader till 180 grader / / i steg om 1 grad myservo.write(pos); / / tala servo gå till position i variabel "pos' delay(20); / / väntar 15 MS för servo att nå ställning}
Delay(2000); för (pos = 180, pos > = 0; pos-= 1) {/ / går från 180 grader till 0 grader myservo.write(pos); / / tala servo gå till position i variabel "pos' delay(20); / / väntar 15 MS för servo att nå ställning} kontrollera = 0; } delay(250); Oss = sonar.ping(); Serial.Print ("Ping:"); Serial.Print(US / US_ROUNDTRIP_CM); Konvertera ping tid avstånd och skriva ut resultatet (0 = utanför visst avstånd sortiment, ingen ping echo) Serial.println("cm"); Serial.Print(check); int jag = oss / US_ROUNDTRIP_CM; Serial.Print ("test rörelse"); Serial.println(i); Serial.Print(itemp); om (jag < 125 & & jag > 70 & & jag! = 0) {kontrollera = 1;}}
BLDC Motor Control med Arduino, bärgades HD motor och hallgivare

PIR rörelsedetektor med Arduino: Drivs på lägsta energiläge som konsumtion

Styra en magnetventil med Arduino

Metall Doctor Who Sonic skruvmejsel med Arduino

IPhone Universal Learing Remote med Arduino

Skicka och ta emot MIDI med Arduino

Säkerhetssystem och tillgång kontroll med Arduino och RFID-

LED Christmas sweater med Arduino

PuttDuino putt-putt hål med arduino

Bildskärmsmenyn ljud ATM-7 Smartphone talaren med Arduino och Blynk

Motstånd Color Code kalkylatorn med Arduino

Gå av i soffan, med Arduino, 3d tryckta inhägnad och programmerade med Embrio
POV Cylinder med Arduino vederbörlig

KOMMA igång med ARDUINO #3 Summer

2WD röst kontrollerat Robot med Arduino och BitVoicer Server

PHloat2 DIY surt vatten testning skulptur & kit med arduino

Grundläggande raden efter Robot med Arduino

AtoZ av RC hobby + DIY radio med ARDUINO
