PIC 16F917 gyroskop gränssnitt






Gyroskopet är en rörelsesensor som känner av lutning i en viss riktning. Sensorn som används är en yaw pulssensorn (gratis prov från analoga enheter. Gyroskop ADXRS613 skickades i en utvärdering paketet EVAL-ADXRS613). Yaw innebär rotation runt den vertikala tillgången. Och rate innebär accelerationen av denna roterande rörelse.
Utdata från denna sensor är analog signal som representerar girningshastighet i viss riktning (vänster eller höger).
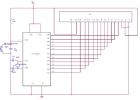
De analoga signalerna omvandlas i ADC modul av PIC16F917 och finns representerade på en LED kolumn enligt girningshastighet och riktning.
Programmet är mycket enkelt och rakt framåt. Det börjar genom att konfigurera portarna på mikrokontroller för ingång och utgång. Då är ADC modulen också konfigurerade (kanal, provtagning ränta och resultatet dataformat).
Sedan börjar den oändlig loopen av programmet som innehåller kliva av
omställningen, börjar
väntar på konvertering att slutföra och
visar resultatet på lysdioderna.
När kretsen flyttar i klocka klok riktning, antal lysdioder i en hälften av lysdioder kolumn belysa enligt förändringstakten i kantiga rörelse.
Och när kretsen flyttar i counter klocka klok riktning, den andra hälften av lamporna lyser upp som indikerar förändring i riktning och som anger förändringstakten i kantiga rörelse.
Detta är kretsen som visas på Proteus 7 simulering miljö
Gyroskopet ersätts i simulering av ett variabelt motstånd eftersom Proteus 7 inte innehåller en gyroskop modell.

PIC 16F917 mikrokontroller programmerare

LED LYT Meter: LED, PIC mikrokontroller och flytta genomsnittliga kod

Lösenord baserat kretsbrytaren
Lila Mood Light Cube

Rotary dialer PIC gränssnitt

Gränssnitt för 3-axlig gyroskop Sensor BMG160 med Raspberry Pi

Gränssnitt för 3-axlig gyroskop Sensor BMG160 med Arduino Nano

Gränssnitt för 3-axlig gyroskop Sensor BMG160 med partikeln

MATLAB till PIC seriellt gränssnitt

Bluetooth trådlös spänning Meter med Wiimote + Pic Chip + AutoIt

PIC 12F675 programmerare/OscCal återställning/testare

Kul med PIC församling - episod 18

En LED Tärning med en PIC 16F84 (eller 16F88)
Gränsyta 16 X 2 LCD med PIC mikrokontroller

Wall lampetter med dolda Weather Display och påtagliga användargränssnitt

IR spårning torn med PIC och C

PIC KICK TWEET!
Intro till PIC-mikrokontroller
