PUPPET CONTROLLER (1 / 7 steg)
Steg 1: Servo koden för Arduino

Delar:
2 servomotorer
Arduino ombord (jag har en skruv sköld på det, men det är inte kritisk)
Potentiometer (detta är 0 till 100Kohm)
Hoppare ledningar
Piprensare (för show).
1 - tråd servomotorer. Dessa är specialmotorer, du kan mata in en vinkel och motorn kommer att göra det. Servon har tre sladdar: Power (röd, 5V) - marken (svart) - gul (kommunikation - vinkel info går här).
I denna setup: röd går Arduino 5V, svart går till Arduino marken, gul kommer att gå till särskilda ingång/utgång stift på Arduino.
Servo 1: Gul---Pin 9
Servo 2: Gul---stift 10
2 - tråd potentiometern
Detta har tre leder.
Bly 1---5V
Leda 2---Pin 0
Leda 3---marken
3 - kod-
Koden nedan är från Arduino exemplet för servo motorstyrning. Den innehåller biblioteket, servo, som gör det enkelt att kommunicera till servo.
Detta också kartor (skalor) input från potten i en vinkel (i radianer) för servomotor. Vi vill ha två motorerna gå i motsatt riktning. Att göra detta jag har översatt den låga potten värdena till värdena som hög vinkel.
Du kommer lnotice det finns några referenser till "serial" - det här kan du skicka data från Arduino över USB till datorn. Du kan visa värdena, detta är användbart.
Obs: Instructables redaktören tappar den lina till omfatta servomotor.
Det ska bli så här:
#include < Servo.h >; använda servo bibliotek
Marionett munnen kontroller
-två servon
-mittemot vinklar
-Pot input
Arduino kod / / /
Detta är från ett exempel inluded Arduino IDE att ladda ner.
Kontrollera en servo position med en potentiometer (variabelt motstånd)
av Michal Rinott
MPC - lagt till serial output 'n stuff
/*
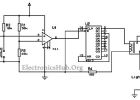
Här är ledningarna:
Kablage-
|---Arduino Gnd
Encoder |---Analog 0
|---Arduino 5V
| Gul---Digi 9 (PWM)
Översta servo | Röd---5V
| Brun---Gnd
| Gul---Digi 10 (PWM)
Botten servo | Röd---5V
| Brown---
*/
#include < Servo.h >; använda servo bibliotek
Servo myservo; skapa objekt för att styra en servo servo
Servo otherServo;
int potpin = 0; analoga pin används för att ansluta potentiometern
int val; variabel att läsa värdet från det analoga stiftet
int valComp;
void setup()
{
myservo.attach(9); tillmäter objektet servo servo på pin 9
otherServo.attach(10);
Serial.BEGIN(9600);
}
void loop()
{
Val = analogRead(potpin); läser värdet i potentiometern (värde mellan 0 och 1023)
valComp = analogRead(potpin);
Serial.println(val);
Val = karta (val, 0, 1023, 90, 179); skala den att använda den med servo (värde mellan 0 och 180)
valComp = karta (valComp, 1023, 0, 0, 90);
myservo.write(val); anger servo skalad värde
Delay(15);
otherServo.write(valComp);
Delay(25); väntar på servo att komma dit
}

Camo Xbox Controller
Automatisk tvättrum Light Controller krets

Hemgjord 100 HP Motor Controller för en elbil

200kW AC Motor Controller för elektriska bil
555 PWM Controller

Påsk Finger Puppets steg för steg DIY & gratis mönster

Kyssas Puppets

En Wi-Fi baserat Controller för modelltåg, Halloween rekvisita, energi övervakning och mer!

Bluetooth SNES controller/gamepad

Costumized controller

Remote Controller Safe

Julljus fotocell Controller

Automatiska persienner Controller (PICAXE)

B & Q homeeasy hemautomation centralvärme controller hacka

Egen byggt MIDI-Controller

Dub Cadet: Holografiska MIDI & LED-Controller för Arduino - del 1

Elektriska Funkatron: En gitarr-stil MIDI Drum Controller

Dual Channel Sous Vide Controller
