PUPPET CONTROLLER (2 / 7 steg)
Steg 2: Lägg till en flex-sensor


Så kan du byta ut för olika sensorn. Jag använder en flex sensor från instructables. Sensorn som ändras motstånd när det är böjd. Det är från [# #referens ##].
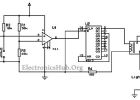
Flex sensorn hakas såhär:
5V----------
|
PIN-0---100K---ena änden av flex sensor---
| |
| Flex Sensor
| |
Marken---andra änden av flex sensor---
Resistor värdet beror på motståndet av sensorn. Det bör vara i samma division som max motståndet av sensorn. Du måste också justera koden mappning av invärdena till servo vinkel.
Leta efter denna kodrad:
Val = karta (val, 40, 350, 90, 179); skala den att använda den med serv
Här är en video:
Ersätta potentiometer med flex-sensor
-Justera Analog indatavärden så allt fungerar rätt med flex sensorn. Det är okej att gissa lite
-Här är den uppdaterade koden
Arduino kod / / /
Kontrollera en servo position med en potentiometer (variabelt motstånd)
av Michal Rinott
MPC - lagt till serial output 'n stuff
Med flex sensor
-Justera Val till vinkel karta
/*
Här är ledningarna:
Kablage-
Flex Sensor |---Arduino Gnd
Flex Sensor |---Analog 0
100K |---Analog 0
100K |---Arduino 5V
| Gul---Digi 9 (PWM)
Översta servo | Röd---5V
| Brun---Gnd
| Gul---Digi 10 (PWM)
Botten servo | Röd---5V
| Brown---
*/
#include
Servo myservo; skapa objekt för att styra en servo servo
Servo otherServo;
int potpin = 0; analoga pin används för att ansluta potentiometern
int val; variabel att läsa värdet från det analoga stiftet
int valComp;
void setup()
{
myservo.attach(9); tillmäter objektet servo servo på pin 9
otherServo.attach(10);
Serial.BEGIN(9600);
}
void loop()
{
Val = analogRead(potpin); läser värdet i potentiometern (värde mellan 0 och 1023)
Serial.println(val);
valComp = analogRead(potpin);
Serial.println(val);
Val = karta (val, 40, 350, 90, 179); skala den att använda den med servo (värde mellan 0 och 180)
valComp = karta (valComp, 350, 40, 0, 90); andra servo gör motsatta
myservo.write(val); anger servo skalad värde
Delay(15);
otherServo.write(valComp);
Delay(25); väntar på servo att komma dit
}

Camo Xbox Controller
Automatisk tvättrum Light Controller krets

Hemgjord 100 HP Motor Controller för en elbil

200kW AC Motor Controller för elektriska bil
555 PWM Controller

Påsk Finger Puppets steg för steg DIY & gratis mönster

Kyssas Puppets

En Wi-Fi baserat Controller för modelltåg, Halloween rekvisita, energi övervakning och mer!

Bluetooth SNES controller/gamepad

Costumized controller

Remote Controller Safe

Julljus fotocell Controller

Automatiska persienner Controller (PICAXE)

B & Q homeeasy hemautomation centralvärme controller hacka

Egen byggt MIDI-Controller

Dub Cadet: Holografiska MIDI & LED-Controller för Arduino - del 1

Elektriska Funkatron: En gitarr-stil MIDI Drum Controller

Dual Channel Sous Vide Controller
