Racing svävare (1 / 7 steg)
Steg 1: Designa koncept

Visas ovan är konceptet diagrammet av vår design. Som ni kan se, kärnan i våra racing svävare är en Arduino Mega 2560 mikro-controller, alltså svävare är smart. En trådlös PlayStation 3 joystick används som fjärrkontrollen, så i början av varje ras, vi par joysticken och Arduino styrelsen. Eftersom Playstation 3 joysticken är omsorgsfullt utformad för bra spelupplevelse, är styra vår svävare njutbar.
Det mest unika med vår design är placera av huvudsakliga propeller. Till skillnad från andra traditionella mönster fixa vi propellern på en servomotorpå framsidan av kroppen, dra den framåt snarare än att skjuta den. Genialitet är inspirerad av min fars gamla sedan. Styrs genom att rotera hjulen, så det är lätt att styra när framöver men svårt att göra det när du återför. Från detta antar vi att styrinrättningar på framsidan gör det lättare att styra. Eftersom servomotor kan ändra riktning på propellern dragkraft, kan svävare styras upp lätt.
Du kanske har märkt att det finns två små propellrar fast på båda sidor. De två propellrarna är fast på två extra steer motorer, som ger extra manöverorganet vridmoment för svävare. Eftersom tävlingsbanan slingrande, några av svarvspån är ännu skarpare än 90 grader, bra styrning kapacitet innebär championship. Genom att lägga till extra styrning struktur, kan vår svävare även vända utan att gå framåt.
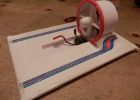
Som för den lyftande delen används en billig dator fläkt för att lyfta upp systemet. En förseglad PVC förkläde syftar till att öka effektiviteten i fläkten.
För att hämma egen snurra när svävare lyfts, är ett gyro omfattning används för att upptäcka de vinkelformig hastigheten av systemkortets. Att upptäcka skickas till Arduino styrelsen och vissa korrigering ska göras av Arduino, så svävare kan gå rakt på länge.
Det kan vara lite förvirrande att formen på systemkortets visas i diagrammet är för den verkliga bilden. Anledningen är att runda formen inte är lätt att göra för hand, så vi väljer att använda rektangeln parkettgolv direkt.

Fjärrstyrda Racing svävare
R/c racing svävare, 2 kanal

Del ett, en bra grund att bygga ett fack bil spår -
Skylanders födelsedagsfest

Tillverka en huvudsakliga Hoop för en störtbåge

Bygga en elektrisk racing bil

Hur man gå spearfishing och vara säkert och ansvarsfullt

Hur man rida raceing cykel seaftly

COOKIE MONSTER RACING hjälm

Bygga en Mini Racing Quadcopter för £50

DIY Bluetooth kontrollerad svävare

DIY FPV Racing Drone

DIY Modular & omvandlingsbara FPV Racing Quadcopter!

Arcade Racing installationsprogrammet för XBOX 360

PMod Racing linjalen!

FPV 250 klass racing drone

Racing Wheel Stand

Racing Seat 2.1 + passagerarsätet
