Racing svävare (3 / 7 steg)
Steg 3: Steg för steg 1: designa kopplingsschema

Visas ovan är en kort kopplingsschemat. Alla gröna kablar menar 5V strömförsörjning, alla svarta kablar menar marken, alla röda kablar innebär den råa voltage(11.1V) av batteriet, vita kablarna innebär PWM kontroll av ledningar och de två orange kablarna är SPI kommunikationsport, som är en bro mellan gyrot och Arduino styrelsen.
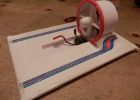
Borstlös motor fungerar som den huvudsakliga propellern, drivs genom en elektronisk varvtalsregulator, som tar PWM-signal från Arduino styrelsen och justera motorn enligt signalen rotera hastighet.
Fläkten styrs också av PWM-signal. Nämligen, kan vi justera lyftkraft enligt friktion av golvet. Om vi vill svävare körs mer stadig, vi bara klippa ner lyftkraft och få friktionen eller vi bara öka lyftkraft och låt den gå snabbare för att tävla för mästerskapet.
Två extra motorerna drivs av en billig motor förare, L298N motor driver. L298N har två drivande kanaler, nämligen det kan driva två motorer samtidigt. Rotera hastigheten bestäms också av PWM signaler.
Gyro omfattas samtal med Arduino styrelsen genom SPI porten, som redan har bäddats in i den Arduino Mega chipet. Så det är bara se till att du ansluter SCL & SDA stiften på gyro till samma stift på Arduino styrelsen respektive, kan du låta dem tala. Det är ganska bekvämt, höger? Efter varit drivs upp, kommer gyrot identifierar vinkelformig hastighet av svävare och sända det till Arduino, vad du behöver göra är bara aktivera extra motorer att bebo vinkelformig hastighet 0.
Var uppmärksam att rå spänningen som tillhandahålls av batteripaketet är runt 11.1V, vilket är alldeles för hög för Arduino styrelsen och andra komponenter förutom motorer. Så se till att du ansluter batteriet till VIN pin Arduino styrelsen snarare än VCC eller 5V pin. Spänningsregulator inbäddade i styrelsen kan justera 11.1V makten till 5V power automatiskt.

Fjärrstyrda Racing svävare
R/c racing svävare, 2 kanal

Del ett, en bra grund att bygga ett fack bil spår -
Skylanders födelsedagsfest

Tillverka en huvudsakliga Hoop för en störtbåge

Bygga en elektrisk racing bil

Hur man gå spearfishing och vara säkert och ansvarsfullt

Hur man rida raceing cykel seaftly

COOKIE MONSTER RACING hjälm

Bygga en Mini Racing Quadcopter för £50

DIY Bluetooth kontrollerad svävare

DIY FPV Racing Drone

DIY Modular & omvandlingsbara FPV Racing Quadcopter!

Arcade Racing installationsprogrammet för XBOX 360

PMod Racing linjalen!

FPV 250 klass racing drone

Racing Wheel Stand

Racing Seat 2.1 + passagerarsätet
