Servo Pod (4 / 4 steg)
Steg 4: Programvaran (för seriell com)

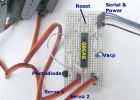
Obs: Växeln måste vara i remote läget (led inte lyser) att använda den seriella porten
Programvaran är inte ännu klar... Glöm inte att öppna porten innan något eller kommer det att krascha.
Numret till vänster är Pan och rätt är Tilt. Bör vara något från 65 till 225 (ändå Pic kommer att ignorera något annat)
Liten ljus "pil" är att flytta till vänster... Håll den (du ser den pan nummer förändringen) och release kommer att skicka data till seriell port
När du sjösätta .exen den också lansera en webbserver på port 2020 där du kan styra Servo Pod (ansluta till serieporten innan du startar din webbläsare)
Att använda webbservern dess ganska enkelt.
http://localhost:2020/A130 A menar stereoplacering detta blir 130 (från 65 till 225) om du vill ha 70 höger: 070
http://localhost:2020/B130 B är Tilt position
http://localhost:2020/C010 C kommer att lägga till numret i den nuvarande Pan pos
De andra bokstäverna har ännu inte implementerats. Om du vill använda den här på en webbsida bör du i princip använda javascript http-begäran eller skicka dem begära i en 1 x 1 iFrame
Jag kan släppa källkoden (häxan är ganska ful...) förr eller senare så någon kunde avsluta det (och lägga till fler saker)
Obs: Vill någon guru dev en bättre programvara (im en web-dev... inte en programvara dude hehe) som är ganska enkel. Allt du behöver för att skicka till den seriella porten är 2 byte från 65 till 225. I min programvara konvertera jag strängen till Int då int till röding. Tecken (2 byte) är sedan skicka på den seriella porten. Också måste du vänta för DSR linjen vara "hög" eftersom detta är maskinvaruhandskakning kontrollera Pic är redo att ta emot. Tack!

Kontrollera De Un Servo Con Niple

3D utskrift RC Servo Splines (Hitec HS - 645MG)

Hur jag Rack-monterade min Line 6 Pod Guitar Effects Processor

Bygga en Bat-Pod (av skräp)

Banksia Pod Slice örhängen
Servo kontroll

A Lego Detached Missile Pod

Bluetooth Servo kontroll

DIY Smartphone spegel Pod

DIY "POD GX studio"

Paintball Pod snabb Loader Mobile Station

Paintball Pod snabb Loader Tool Box bifogad fil Version 1

Paintball Pod snabb Loader Tool Box fastsättning.
Control 2 Servo motorer med en vanlig fjärrkontroll

Konvertera en Servo att slå på och av lysdioder

3D tryckt RC Servo fallet (Hitec HS - 645MG)

En Servo-baserade 4-benta Walker

Böja metall för att konstruera servo & motor fästen, för robotics