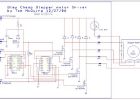
Stepper Motor Easy Driver (3 / 3 steg)
Steg 3: kod:

/*
Stepper Motor Control - en rev fram och tillbaka
Detta program är för SparkFun lätt motor förare ombord.
Detta program kör en bipolär stegmotor.
Motorn är kopplad till marken plus digital stift 8 och 9 i Arduino.
Motorn bör kretsa ett varv i en riktning, sedan
en revolution i den andra riktningen med en hastighet som bestäms av
millisekunder i variabeln microSecDelay.
Skapad av Bill Harper, Feb. 10 2014
*/
#include < Stepper.h >
int oneway; räknare för steg
int onerev = 6400; antal steg varje riktning (redigera det här
för din speciella motor)
int microSecDelay = 30. fördröjning mellan steg och hastigheten på motorn
(ungefär så fort systemet kan reagera,
högre nummer = långsammare)
int dirPin = 8; utgångsstiftet för stepper motor riktning
int stepPin = 9. utgångsstiftet för PIN-koden används för att öka motorn
void setup() {
pinMode (dirPin, produktionen); Tilldela Utläge fästa för riktning
pinMode (stepPin, OUTPUT); Tilldela Utläge fästa för setp
digitalWrite (dirPin, låg); Initiera dir pin
digitalWrite (stepPin, låg); Initiera steg pin
OneWay = 1;
}
void loop() {
om (oneway < onerev + 1) / / fortfarande i första revolutionen?
{
digitalWrite (dirPin, låg); Hålla riktningen pin låg
}
annat
{
digitalWrite (dirPin, hög); Om inte ändra i första revolutionen
riktning pin till hög
}
digitalWrite (stepPin, högt); Steg motor
delayMicroseconds(microSecDelay); Vänta mikrosekunder
digitalWrite (stepPin, låg); Steg motor
delayMicroseconds(microSecDelay); Vänta mikrosekunder
OneWay + = 1; Increment riktning counter
om (oneway > onerev * 2) / / om vi har överskridit två revolutioner
{oneway = 1;} Återställ räknaren för att börja om igen
} // EOF
Lätt att bygga CNC Mill Stepper Motor och Driver kretsar

Stepper Motor grunderna - 6 kablar unipolär / bipolär Motor

Stepper Motor grunderna - 5 kablar unipolär / bipolär Motor

Stepper Motor grunderna - 4 trådar bipolär Motor

Arduino + Stepper Motor kamera reglaget

Trä Gear Clock med Stepper Motor Drive

TB6560 Microstepping bipolär Chopper Stepper Motor Driver

ARDUINO UNO + TB6560 Stepper motor driver

Ställa in en Stepper Motor Driver

Arduino bibliotek för 28BYJ-48 Stepper Motor och ULN2003 Driver

Enkla Stepper Motor Driver för Arduino CNC projekt

Bipolära Stepper Motor Driver

Arduino/Easy Driver Animation Control Board

Attiny85 som steg/Dir Stepper Motor Controller

Bipolära Stepper Motor

Jorden världen roterar med Arduino eller Raspberry Pi kontrollerade Stepper Motor

Stepper Motor bågreaktorn

Hur man använder en Stepper Motor
