Strukturerad ljus 3D Scanning (1 / 8 steg)
Steg 1: Teori: triangulering


Triangulering från inneboende funktioner
De flesta 3D-scanning är baserad på triangulering (undantaget tid-av-flight system som Microsofts "Natal"). Triangulering fungerar den grundläggande trigonometriska principen ta tre mätningar av en triangel och använder dem till återvinna de resterande mätningarna.
Om vi tar en bild av en liten vit boll ur två perspektiv, kommer att vi få två vinkel mätningar (baserat på bollen position i kamerans bilder). Om vi vet också att avståndet mellan de två kamerorna, har vi två vinklar och en sida. Detta tillåter oss att beräkna avståndet till den vita bollen. Så här fungerar motion capture (massor av reflekterande bollar, massor av kameror). Det är relaterat till hur människor ser på djupet, och används i skillnad-baserad 3D-scanning (till exempel Point Grey humla).
Triangulering från planerade funktioner
Istället för att använda flera sensorer, kan vi ersätta en med en laserpekare. Om vi vet vinkeln på laserpekare, som är en vinkel. Den andra kommer från kameran igen, förutom att vi letar efter en laser prick istället för en vit boll. Avståndet mellan laser och kameran ger oss sidan, och från detta kan vi beräkna avståndet till laserpunkten.
Men kameror är inte begränsad till en punkt i taget, vi kunde skanna en hel rad. Detta är grunden för system som DAVID 3D-Scanner, som sopa en linje-laser över scenen.
Eller, ännu bättre, vi kunde projektet en massa linjer och spåra dem alla samtidigt. Detta kallas strukturerad ljus skanning.
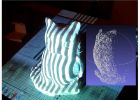
DIY 3D skanner baserat på strukturerad ljus och stereo vision i Python språk

IPad ljus målning

Kinect Hacking (artikel)

Mini projektion-mappade landskap

Hur man skapa Laser konst med en digitalkamera

Hyper Terra

En mögel att sätta på ett ekollon.

Skjuta ut - vakuumformning / fånga verkligheten 3D Scanning (2016)

Billiga & lätt opto-isolerade TTL till 110V ljus kontrollmodul

Ljus upptäcka och positionering enhet

Scan | Fab tabell

MUSA, 3D tryckt korsett från en 3D Scan (av Samuel N. Bernier)

Skapandet av en klistermärke Critter och transmogrification av sin själ till en multi-purpose digital fil (aka skärning, scanning och Live-spårning i en vektor fil) - Jag gjorde det på TechShop San Jose

Scanning hinna negativ med en DSLR

Liten eco-footprint vardagsrum ljus
3D scan något med hjälp av bara en kamera

Att göra en webb-serier: Scanning, rengöring och publicering Lineart

Ljus söker robot ATLAS_15
