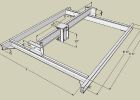
Två axel CNC (1 / 4 steg)
Steg 1: hårdvara
För strömförsörjningen använder jag en gammal PC-nätaggregat med 16A. För ledningar som använder jag 0,125 mm (5V) och 1,5 mm (12V 6A) cooper fläta. Ledningarna är lätt och snabbt gjort. Svåraste var att skydda kablarna från motorerna. Detta gjordes med hjälp av aluminiumfolie runt kablar och infoga en RC-Low-Pass-Filter mellan min gränslägesbrytarna och de ingående stiften på Arduino.
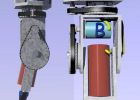
RC-Low-Pass-Filter
Detta låter långt mer komplicerat än det är. Det är bara en resistor och en c-apacitor. Eftersom jag använder grl, kan jag använda i pull-tabs-up pin-läge för att få motstånd, så jag behövde bara en kondensator. Grbl använder pull-tabs-up-pin-mode eftersom detta orsakar mindre förvrängning för växlarna. Det betyder, växlarna vidarebefordrar inte + 5V, de vidarebefordra GND och stiften är drog från 5V till GND genom att utlösa växlarna. Denna kondensator bör vara något mellan 10uF och 0.47uF beroende på förvrängningen. I mitt fall använder jag en .47uF (50V) för y-axeln och en 1uF (50V) för x-axeln. Dessa små kondensatorer en polariserade, så se upp att ansluta GND del till GND, och plus att gränslägesbrytaren- och ingångsstiftet.
Denna RC-Low-Pass-Filter filtrerar våra signaler med hög frekvens. Så bara låga frekvenser kan passera genom. Det innebär att din gränslägesbrytaren signal är långsammare (du kan inte erkänner utan oscilloskop), men du inte läser snedvridningen.
3 axel CNC Router - 60 "x 60"x5"- JunkBot

Parallell Port 3 axel CNC drivrutin, Opto-isolerade, unipolär Steppers

Hemgjord Mini fräsmaskin Mill Router med bilden axel CNC
Hemgjord Mini trä Mill Router fräsmaskin av bilden axel CNC och tabell tryck Drill
Planerar att göra ett Z, C, en axel cnc huvud

Grundläggande nybörjare mini 3 axel CNC mill
DIY Mini Mill Router maskin av bilden axel CNC och Aluminium legering profil
6 axel CNC MACH3 gravyr maskin gränssnitt Breakout styrelsen USB PWM spindel med ASKPOWER A131 serien

Lätt att bygga skrivbord topp 3 axel CNC-maskinen
Hemgjord Mini Router Mill DIY X Y Z axel bild scenen aluminiumram CNC fräsning för 3D-skrivare

CNC förare ombord (Multi axel)
Hemgjord Mini fräsning Router Mill DIY XYZ axel bild CNC
Hemgjord X Y Z axel glida av aluminiumlegering för DIY-Laser 3D-skrivare CNC Router fräsmaskin
DIY XYZ axel glida CNC för hemlagad Mini fräsning Router Mill
Hemgjord Mini CNC fräsning Router Mill DIY Z Collet ER11 axel bild scenen ram Aluminium
Hemgjord Mini CNC fräsning Router Mill DIY X scenen ram axel bild Aluminium
Hemgjord Mini fräsning Router Mill DIY X scenen ram axel bild CNC Aluminium

CNC trä router, cnc router för 3 axel
