Väggen efter Robot med 555 Timer (3 / 4 steg)
Steg 3: elektronik


Någon analog skarpa IR avstånd sensor kommer att göra, men jag använde den lång räckvidd en eftersom det var bekvämare för brandbekämpning konkurrensen. Om din robot är mindre, kan du använda en med kortare räckvidd. Dock bör du överväga den döda zonen avstånd sensorernas när plocka och montera dem. Försök att hålla ungefär halva den döda zonen inuti roboten ram, eftersom det gör att du mer utbud. Emellertid, om det går in i väggen, det kan inte återställa. Än en gång, Känn dig fri att experimentera.
I bilden finns det några motstånd som jag inte tog med i den lista eller Schematisk, eftersom de inte lägger till funktionalitet.
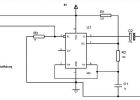
Också, i schematiskt, inte det visar hur tråd IR-sensor sensorn. Det finns 3 trådar på det. Den röda sladden (power) går till 5V efter regulator., gul (signal) tråd går till ingången på Op amp bufferten och den svarta kabeln (marken) går till marken.
Det finns också ett 1000uF tak över 5V leverans.
Slutligen, servomotorer drivs av oreglerad spänning direkt från batteriet. Om du använder olika servon och ett annat batteri, kan du behöva driva dem från 5V leverans om de inte är klassade för spänningen batteriet ger. Regelbundna servo kablar har olika färger då Vex servo kablar, så det är upp till dig att koppla dem.

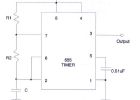
Motor Driver med 555 Timer IC
Basic (PWM) varvtal kontroll med 555 Timer ICs
Cirkelträning Diagram av vattennivån larm med 555 Timer

Enkel (och smutsiga) puls bredd modulering (PWM) med 555 Timer

Automatisk vattenkran med 555 timer
Blinkande LED med 555 Timer

Blinker med 555 timer

Kusliga ljud med 555 Timer

Krets planering: Skapa en Dual blinkande LED krets på Protoboard med 555 Timer

Bultande/blekning/blinkande LED med 555 Timer

Time Lapse Intervalltimer för systemkameror med 555 timer IC

Grundläggande raden efter Robot med Arduino

Enkla alternativ LED blinkar med 555 timer

Enkla elektroniska Piano med 555 timer i CD-fodralet
Astable Multivibrator med 555 Timer

Star Trek Red Alert ljudeffekt (med 555 timer)

Blinkande LED Railroad lampor gjorda med 555 timer

Linje & väggen efter Robot
