Väggen efter Robot med 555 Timer (1 / 4 steg)
Steg 1: material
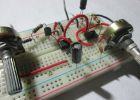
Roboten använder endast en enda IR avstånd sensor, två kontinuerlig rotation servomotorer och en 556 (eller 2 x 555) krets för sin huvudsakliga verksamhet. Men behöver du också en ram, hjul, batterier och alla typer av diverse grejer det fungerar. Allt som är upp till dig. De delar som jag använde är vad jag hade på hand på gång och är inte nödvändigtvis optimala för detta projekt. Jag kommer att berätta de delar jag använt, men du kan använda vad du vill så länge principerna är desamma.Delar jag använde:
-RAM:
--8" aluminium cirklar
--3 x Random erector ange L kanal
--3 x Vex axlar
--6 x Vex kragar
--några brickor.
--Vex skruvar i olika storlekar
--4 x Vex motor montera spacer saker
--6 x Vex standoffs
--2 x random barer med 5 hål
--2 x Vex hjul
--Vex omniwheel
--2 x Vex motorer
(du kan bara göra det ur akryl och regelbundna kontinuerlig rotation servon med några hjul och en caster)
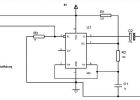
-Elektronik:
--Skarpa IR GP2Y0D02YK (Känn dig fri att använda någon annan skarp IR-sensor du känner fall)
--LM556
--LM 7805 spänningsregulator
--2 x 330 K motstånd
--2 x 104 (.1uf) kondensatorer
--1uF kondensator
--2.2uF kondensator
--741 op-amp
--Dioder (tror jag de flesta typer kommer att fungera)
--2 x 20 k pott
--1000 uF kondensator (över strömförsörjningen)
--Vex batteri
--alligator clips att ansluta batteriet med
--Skärbräda
--Switch (att slå på och av)

Motor Driver med 555 Timer IC
Basic (PWM) varvtal kontroll med 555 Timer ICs
Cirkelträning Diagram av vattennivån larm med 555 Timer

Enkel (och smutsiga) puls bredd modulering (PWM) med 555 Timer

Automatisk vattenkran med 555 timer
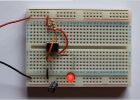
Blinkande LED med 555 Timer

Blinker med 555 timer

Kusliga ljud med 555 Timer

Krets planering: Skapa en Dual blinkande LED krets på Protoboard med 555 Timer

Bultande/blekning/blinkande LED med 555 Timer

Time Lapse Intervalltimer för systemkameror med 555 timer IC

Grundläggande raden efter Robot med Arduino

Enkla alternativ LED blinkar med 555 timer

Enkla elektroniska Piano med 555 timer i CD-fodralet
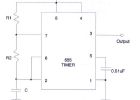
Astable Multivibrator med 555 Timer

Star Trek Red Alert ljudeffekt (med 555 timer)

Blinkande LED Railroad lampor gjorda med 555 timer

Linje & väggen efter Robot
